

发布时间:2026-03-28
步进电机作为一种控制电机,可以将电脉冲信号转化为角位移,在3D打印机、医疗设备、机器人等领域应用广泛。前面我们写了很多篇文章解释步进电机的运行原理,大多着眼于电机本身,但对于步进电机而言,驱动器的重要性就像操作系统对于电脑一样。而要理解步进电机驱动器的核心原理,我们不妨从步进电机本身的运行机理说起,一步步揭示驱动器设计中面临的矛盾,以及现代驱动技术如何优雅地解决这些矛盾的。
一、为什么需要驱动器
步进电机的转动并非依靠连续电流,而是需要各相励磁线圈按照特定的顺序依次通电。
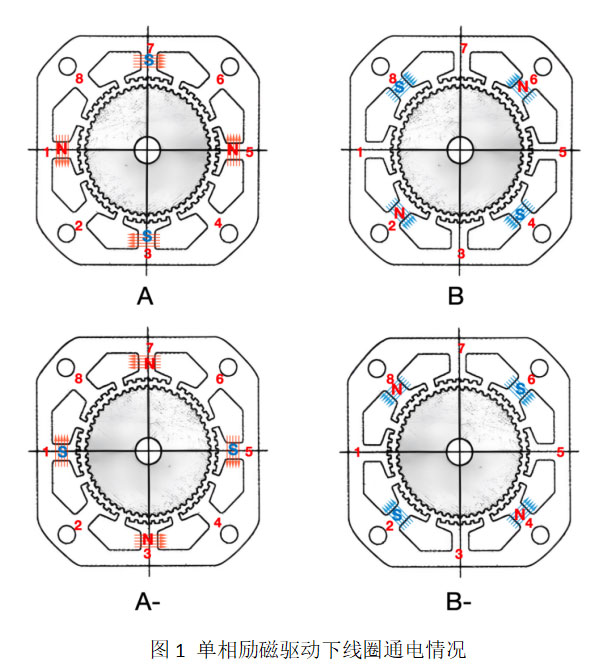
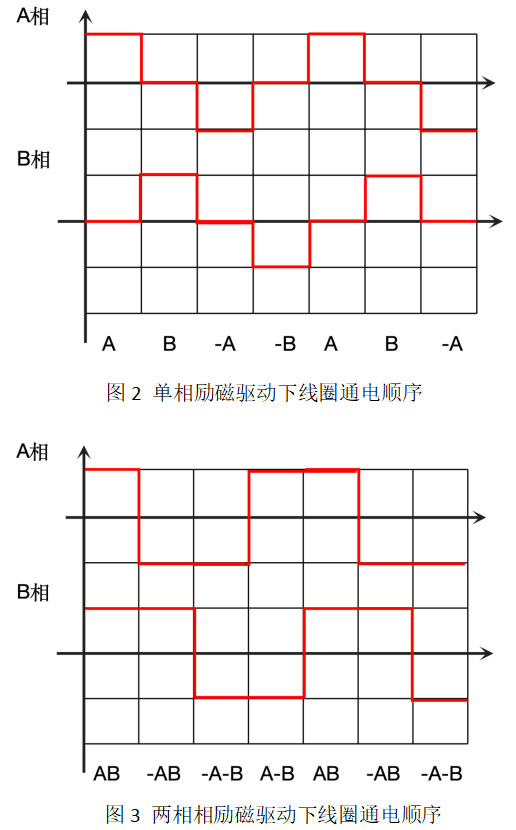
如图1所示,单相励磁驱动下,A/B两相线圈按照A_B_A-_B-_A的顺序依次通电,每一次通电,电机转子便移动一个步距角,如此循环,电机便实现了连续的旋转运动。而A/B两相电流的情况如图2所示。若是两相励磁,那么两相通电情况如图3所示。
这种工作方式决定了步进电机无法直接由单纯的直流电源或交流电源驱动,而需要一个专门的“控制器”来按照时序给各相线圈通电。更关键的是,脉冲持续的时间决定了电机的转速——转速越高,每相通电的时间就越短,通常在毫秒甚至微秒级别。例如:对于1.8°的步进电机,信号频率为500pps时,电机的转速为60*500*1.8°/360°=150rpm,此时,每个信号持续2ms,每相线圈的通电时间也就是2ms。当电机转速达到300rpm时,这个时间缩减到1ms。在如此短的时间内完成通电、断电的精确控制,依靠人工或简单的开关显然不现实,这便是步进电机驱动器存在的目的:按需、按时、按序为各相线圈提供电流。
二、力矩与发热的矛盾
我们都知道步进电机的输出力矩主要来源于电磁力矩,而电磁力矩的大小直接取决于线圈中通过的电流,磁饱和之前,电流越大,力矩就越大。然而,线圈是由细铜线绕制而成的,根据焦耳定律Q=I2R (1)大电流将导致产热量飙升,产生的热量迅速积聚便导致线圈绝缘层熔化,最终烧毁电机。
这就引出了第一个矛盾:为了获得更大的力矩,我们希望电流尽可能大;但为了保护电机,电流又不能超过额定值。然而,这只是表面矛盾,真正的麻烦还在后面。
三、电感的“拖延症”
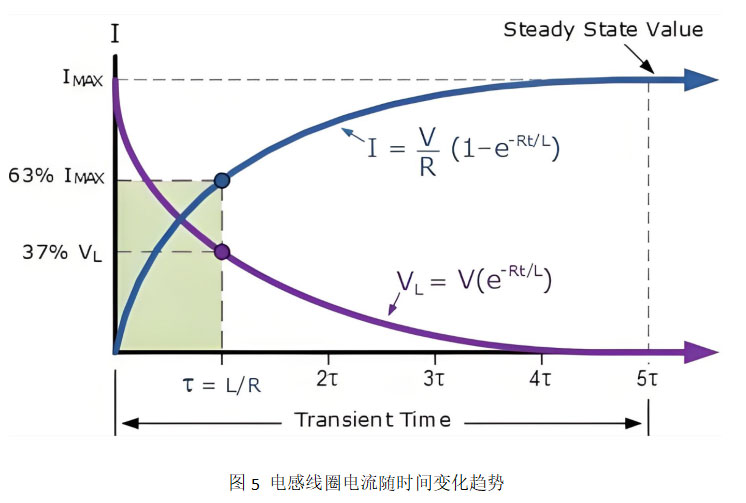
线圈不仅具有电阻,还具有电感。电感是一种抵抗电流变化的特性——当电压施加到线圈两端时,电流不会瞬间跳变到稳态值U/R,而是按照以下公式逐步上升:
I(t)=UR(1−e−tL/R) (2)
式中,L/R被称为时间常数,它决定了电流上升的快慢。以一个典型的步进电机为例:相电阻R=9Ω,相电感L=18mH,则时间常数τ=L/R=2ms。这意味着,电流达到稳态值的63%需要2ms,达到95%则需要约3个时间常数(6ms)。
这一特性在电机高速运转时带来了严峻挑战。
四、电压选择的困境
假设我们给线圈施加一个较低的电压,比如9V。那么稳态电流为9V/9Ω=1A,我们假设1A为电机的额定电流。当电机低速运转时,电流有足够的时间达到稳态,并没有问题。但当电机转速提高时(比如300rpm),每相通电时间可能只有1ms。在1ms的时间内,电流能上升到多少?根据电流公式,t=1ms时,I=1A×(1−e^−0.5)≈0.39A——还不到额定电流的40%。电流不足,力矩自然不足,电机高速时便“无力”、丢步甚至堵转。
看来电压低了不行,那如果提高电压呢?比如施加24V。这时在高速下,1ms内,电流上升到24/9×(1−e^−0.5)≈1A,似乎勉强满足需求。但回到低速情况下,单相线圈的通电时间足够长,而稳态电流将达到24/9≈2.6A,远超额定值,这时线圈的发热是额定状况下的7倍,电机严重发热甚至烧毁。我们发现:我们无法同时满足“低速时电流不过大”和“能高速时电流快速建立”这两个要求。这便是步进电机驱动中最核心的矛盾:电压与转速的矛盾。
五、从妥协到恒流控制
为了解决这一矛盾,我们尝试过多种方法。
最初采用的单电压恒压驱动方式,为了改善高速性能,采用了高电压+串联电阻的方案——高速时能快速拉升电流,低速时又能通过串联电阻限流,避免过热。但问题在于这种方法效率非常低,串联电阻发热严重,消耗了大量功率。
后来逐渐开发出了高低压驱动方案:在通电开始阶段,施加高电压,快速拉升电流;一旦电流达到额定值,立刻切换到低电压,维持电流。这种方法在一定程度上兼顾了快速响应和稳态安全,但控制逻辑较为复杂,且高低压切换点的确定不够精确,仍然存在过冲风险。
这些方法本质上都是电流“开环”控制,无法根据实际电流值动态调整,因此难以做到精确、高效。直到斩波恒流驱动技术的出现,这一矛盾才被真正解决。
斩波恒流驱动的核心思想是:无论电机处于高速还是低速状态,始终让线圈电流保持在一个恒定值,即额定电流。斩波恒流驱动器往往采用高电压供电(例如24V、48V),但通过闭环控制来限制电流。
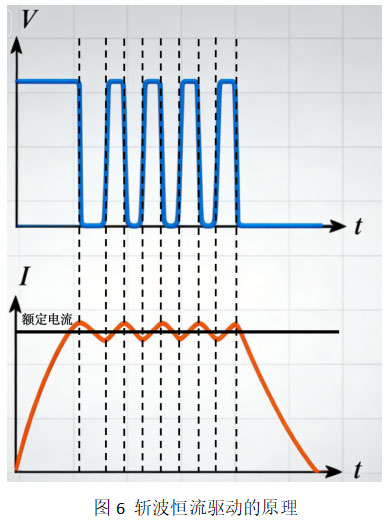
在通电初期,电流远低于设定值,驱动器将开关管完全导通,将高电压直接施加到线圈两端,电流以极快的速度上升,在极短时间内达到设定值(例如在48V下,上述线圈电流达到1A所需的时间为0.4s)。这就解决了高速时“来不及建立电流”的问题。而电流一旦达到额定值,驱动器立即关断开关,电流便停止上升,转而“原路降低”,驱动器检测到电流低于额定值时,又立即打开开关,使得电流继续升高。就在这不断开关过程中(也就是所谓的“斩波”),电流在额定值附近“反复横跳”,形成锯齿状的电流波形,其平均值始终等于设定值。这个过程可以形象地理解为:用一个高压“泵”快速把电流抽上来,再用一个精密的“阀门”控制住,不让它超过安全线。无论电机转速如何变化,驱动器通过检测实际电流并实时调整开关管的导通与关断,始终将电流钳制在设定值。而这个过程中电流是如何被检测的呢?实际上电路中设置了一个小的检测电阻,通过检测该电阻两端的电压值来计算回路中的电流。一般的驱动器都可以通过拨码开关设置额定电流,这个拨码实际上就是调整检测电阻的阻值。
斩波恒流控制完美地解决了前述的矛盾:高电压保证了电流能够快速建立,从而即使在高频时也能输出足够力矩;恒流控制保证了电流不会超过额定值,避免电机烧毁。同时,由于开关管主要工作在饱和导通和完全关断状态,其自身损耗远低于电阻限流方案,驱动效率大大提高。
如今,斩波恒流驱动控制已成为最主流的驱动方式,它让步进电机能够在从每分钟几十转到上千转的宽速域内,始终保持稳定的输出力矩,成为工业自动化领域不可或缺的基础元件。