

发布时间:2026-03-12
我们知道步进电机主要分为永磁式(PM)、可变磁阻式(VR)以及混合式(HB)三类。永磁式步进电机的转矩来源于定子励磁磁场和转子的永磁磁场的相互作用,称为电磁转矩;可变磁阻式步进电机没有永磁体,转矩来源于电机凸极结构磁阻最低的倾向,称为磁阻转矩。而混合式步进电机结合了永磁式(PM)和可变磁阻式(VR)步进电机的特点,因此转矩来源于电磁转矩和磁阻转矩的合成作用,本文将详细拆解混合式步进电机的转矩来源。
1.永磁转矩
永磁转矩提供了混合式步进电机最主要的转矩,源自励磁线圈产生的磁场和转子永磁磁场的相互作用。
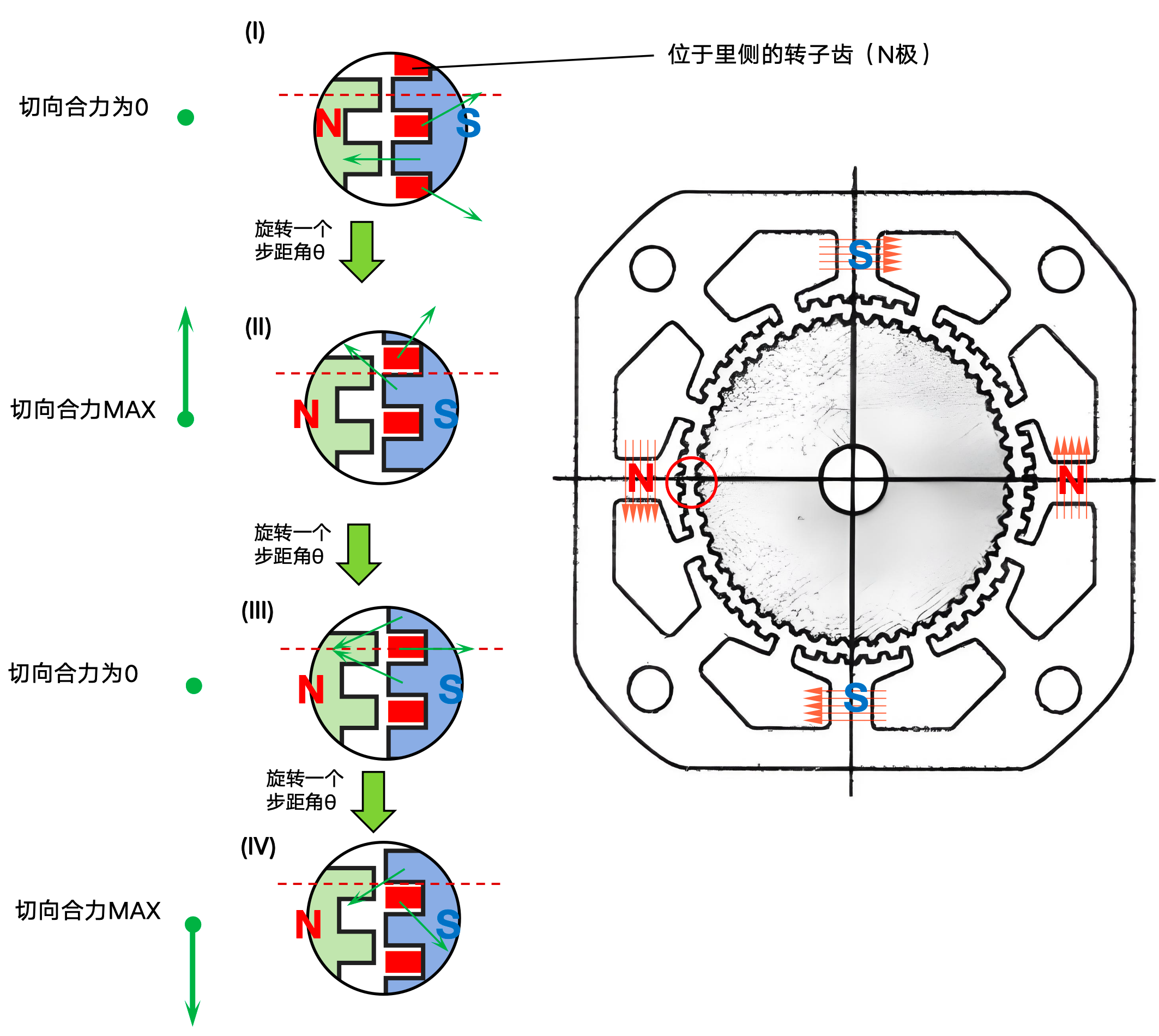
图1 单相通电,转子在不同位置的受力分析
如图1所示,我们给一台步进电机的一相通电,定子左右两个极是N极,上下两极是S极;转子靠外侧是S极,里侧是N极。以最左侧的定转子齿为例来分析,位置(I)显然是一个稳定的平衡位置,转子定子的N极齿和转子的S极(外侧)齿对齐,与转子的N极(内侧)齿错开。对转子做受力分析,可以发现每个定子齿对转子的电磁作用力是对称的,在切向相互抵消合力为0。
顺时针转动转子,会产生相反方向的转矩,试图将转子拉回位置(I),当转动一个步距角θ,到半对齐位置(II)时,切向的合力达到最大值。再继续转动,切向力将逐渐减小,当转动2θ到齿槽相互错开位置(III)时,切向合力为零。
继续旋转,定子对转子的合力变成和运动方向一致(顺时针)并逐渐变大,在转动3θ到位置(IV)时达到最大。继续转动,转矩逐步减小至0,即回到位置(I),转矩完成了一个完整周期的变化。
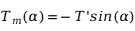
由上面的分析可以发现,电磁转矩的变化周期是4个步距角,这正好对应了一个完整的电磁周期。若规定转动方向为正,那么转动角度在0-2θ时,转矩为负,转动角度在2θ-4θ时,转矩为正。那么电磁转矩可以表达为:
 |
(1) |
其中,Tm为电磁转矩,T’为最大电磁转矩,α为转动角度(电角度),一个步距角对应的电角度为π/2,Tm的函数曲线如图2所示。
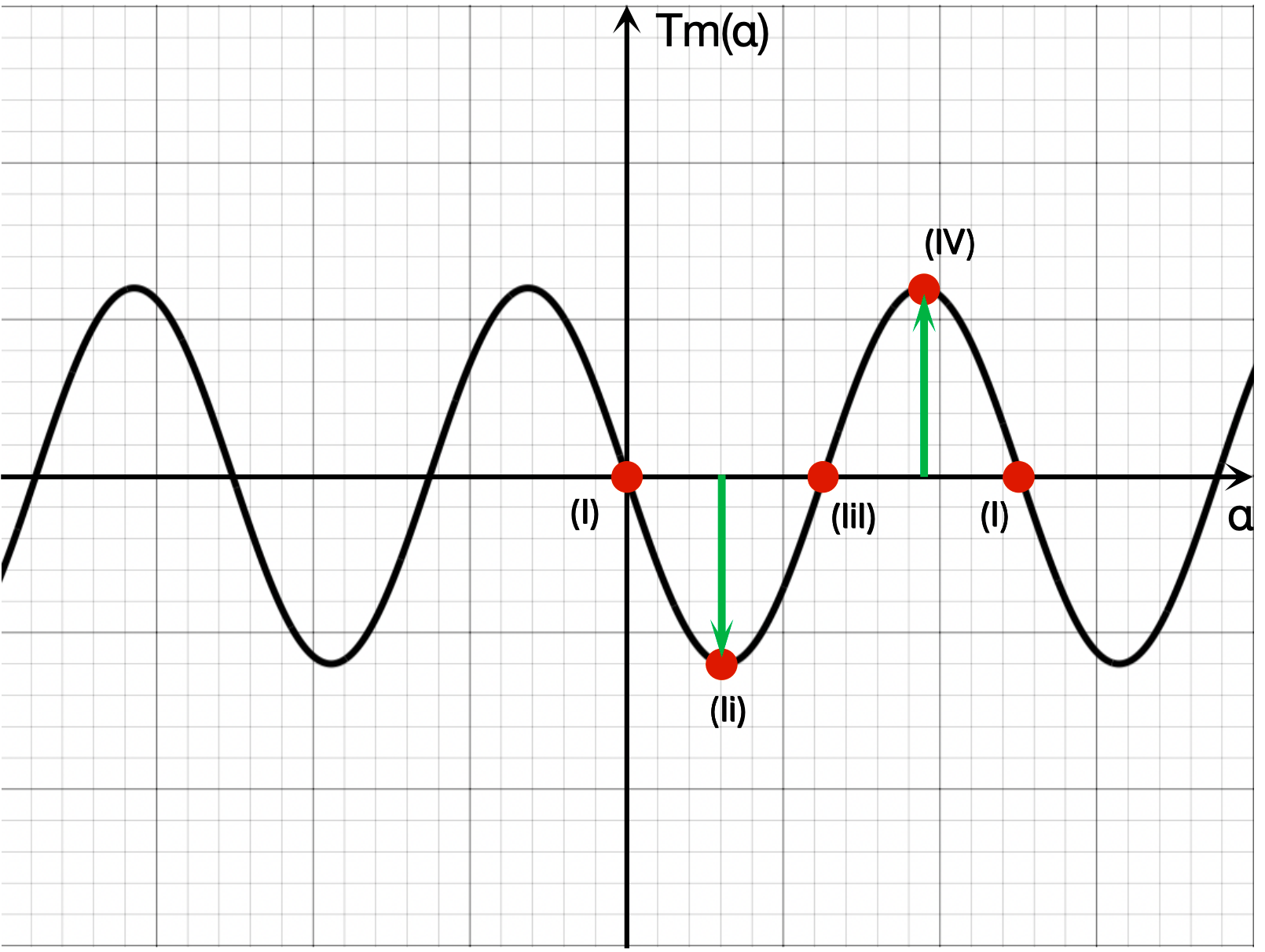
图2 电磁转矩的关于旋转角度的函数曲线
2.磁阻转矩
磁阻转矩是由单纯的凸极结构形成的转矩,研究磁阻转矩的时候应当将电磁转矩的影响剔除,也就是转子永磁体不要充磁。在这种情况下,由于转子齿和定子齿之间气隙磁阻的周期性变化导致周期性磁阻转矩的形成。对于凸极结构,磁阻转矩也遵循三角函数的变化规律,但周期是电磁转矩的一半。这个可以通过最简单的凸极结构来理解。
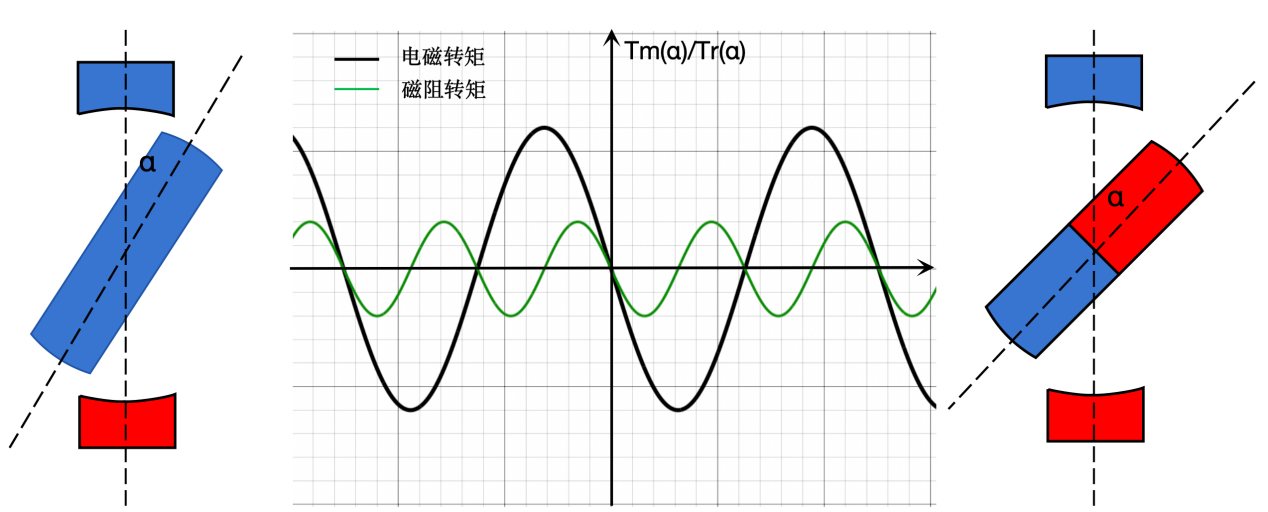
图3 两极凸极结构的电磁转矩和磁阻转矩与旋转角度的关系
如图3 所示,定子有两个极,转子是两个凸极。假如转子是永磁体,那么旋转一周,永磁转矩经历了一个周期;如果转子是软磁体,那么,转子的磁阻转矩则经历了两个周期。
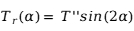
因此对于一般的混合式步进电机,相对定子极是同性的,所以定转子齿对齐的位置是一个不稳定平衡点,偏离该位置,转矩方向和运动方向相同,因此磁阻转矩可以表达为:
 |
(2) |
其中,Tr为电磁转矩,T’’为最大磁阻转矩,α为转动角度(电角度),一个步距角对应的电角度为π/2。电磁转矩、磁阻转矩以及两者的合成转矩图像如图4所示。
图4 磁阻转矩与电磁转矩与偏转角度的函数关系
3.齿槽转矩
除了电磁转矩、磁阻转矩之外,混合式步进电机还存在所谓的齿槽转矩。在定子线圈不通电的情况下转动转子,可以感受到有规律的振动,这就齿槽转矩,也叫做“定位力矩”,这是由于永磁体转子和凸极结构趋向于磁阻最小状态产生的转矩。在混合式步进电机中,齿槽转矩仅包含4k次谐波分量[1],考虑到高次谐波分量的幅值非常小,因此我们仅考虑4次谐波分量。也就是说齿槽转矩可以表达为:
 |
(3) |
其中,Tc为电磁转矩,T’’’为最大齿槽转矩,α为转动角度(电角度),一个步距角对应的电角度为π/2。
那么在齿槽转矩加入之后,电机合成转矩与偏转角度之间的函数曲线如图5所示。
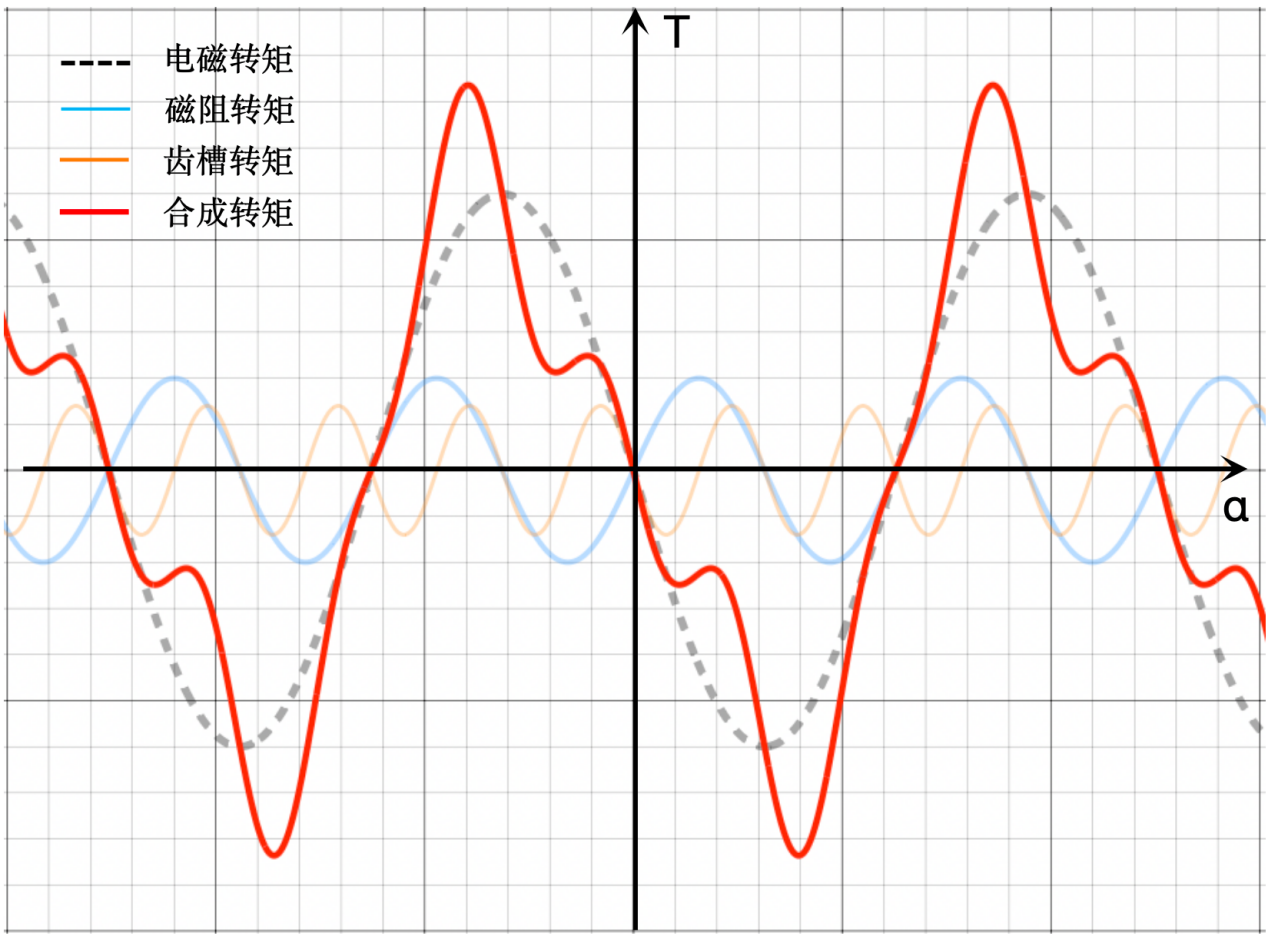
图5 电磁转矩、磁阻转矩与齿槽转矩的合成转矩与偏转角度的函数关系
当然,在以上分析中,我们并不知道电磁转矩、磁阻转矩和齿槽转矩的幅值是多少,所以图5所绘的函数图只是一个示意图,只能做参考。那么实际上,混合式步进电机的以上三种转矩的幅值是多少呢? 我用力矩仪分别做了测量。
首先,测试的样机是金的电机生产的HD42型混合式步进电机,三种转矩的测试条件和结果如下所示:
测试条件 |
转矩/cNm |
|
电磁转矩 |
2A,单相通电 |
250 |
磁阻转矩 |
2A,单相通电,不充磁 |
9 |
齿槽转矩 |
不通电 |
17 |
可以看出,磁阻转矩、齿槽转矩与电磁转矩的大小相差了一个数量级,在电机的运行过程中主要还是由电磁转矩其主要作用。
我们可以发现,在电机运行过程中,齿槽转矩的函数是不变的,因此齿槽转矩做功:
 |
(4) |
而齿槽转矩是一个周期函数,因此其积分可以看做是0。由此可见,齿槽转矩在实际运行中,平均效果是不做功的,仅对合成转矩造成畸变。
根据上面实测的结果,将图5重新绘制,可以得到实际的三种转矩的合成效果,如图6所示。可以看出虽然磁阻转矩和齿槽转矩的幅值很小,但还是对实际的转矩波形造成了影响,使其偏离了正弦波形。
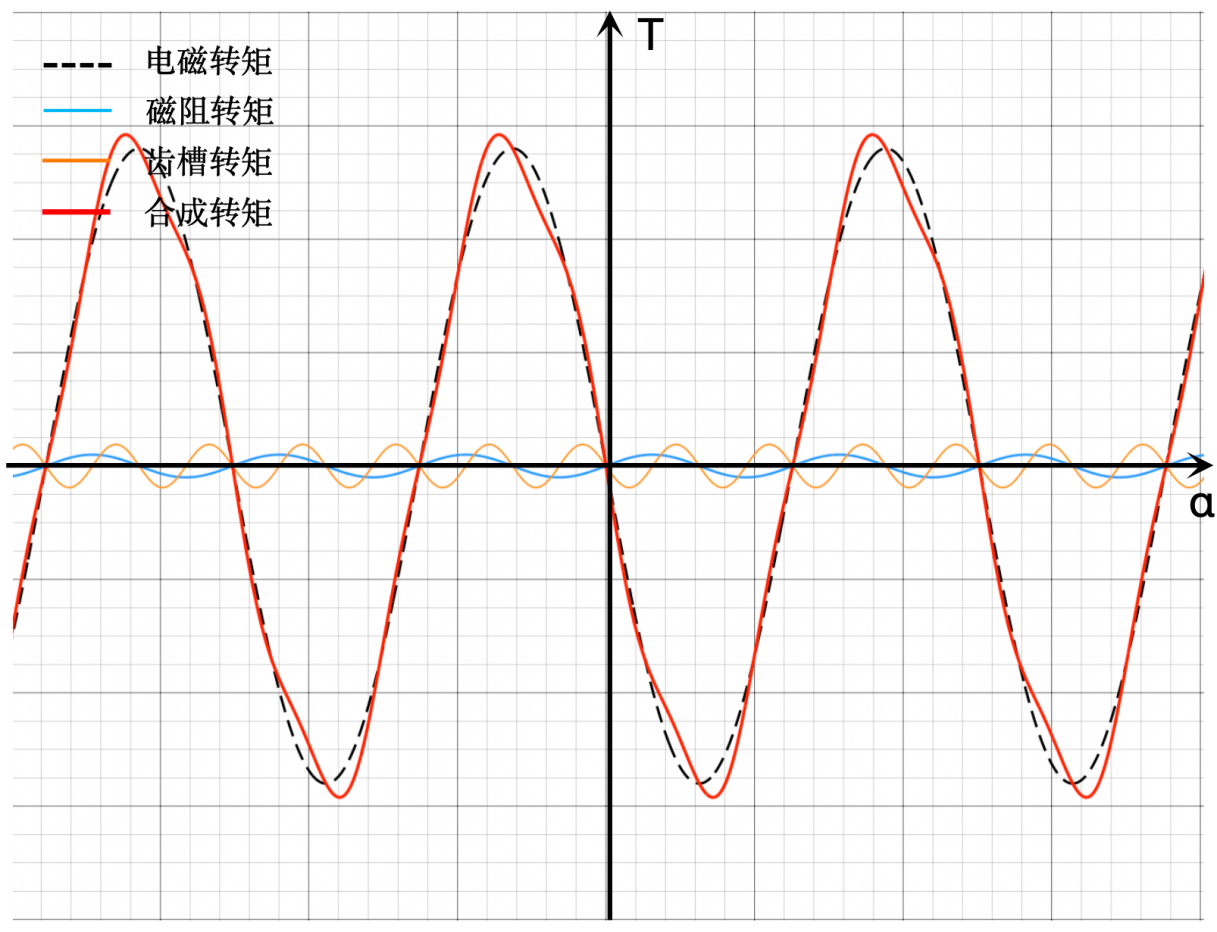
图6 电磁转矩、磁阻转矩与齿槽转矩的合成转矩与偏转角度的函数关系
综上,我们可以得出以下结论:
(1)电磁转矩周期为4个步距角(4θ),磁阻转矩周期为2θ,齿槽转矩周期为θ。
(2)混合式步进电机的转矩来自于电磁转矩和磁阻转矩的合成转矩,电磁转矩占绝对主导地位。齿槽转矩在运行过程中是保守力矩,平均效果为不做功。
(3)对于实际的混合式步进电机,电磁转矩的幅值比磁阻转矩、齿槽转矩(实际也是磁阻转矩)大一个数量级。