

发布时间:2026-01-10
行星齿轮减速机是最常见的电机减速机。如图1所示,行星齿轮减速机包括太阳轮、行星轮、行星架和内齿圈四个主要部件构成。常见的工况下,力矩从太阳轮输入,内齿圈固定,行星轮轴固定在行星架上,太阳轮带动行星轮自转的同时,带动行星架围绕太阳轮公转,力矩从行星架输出。
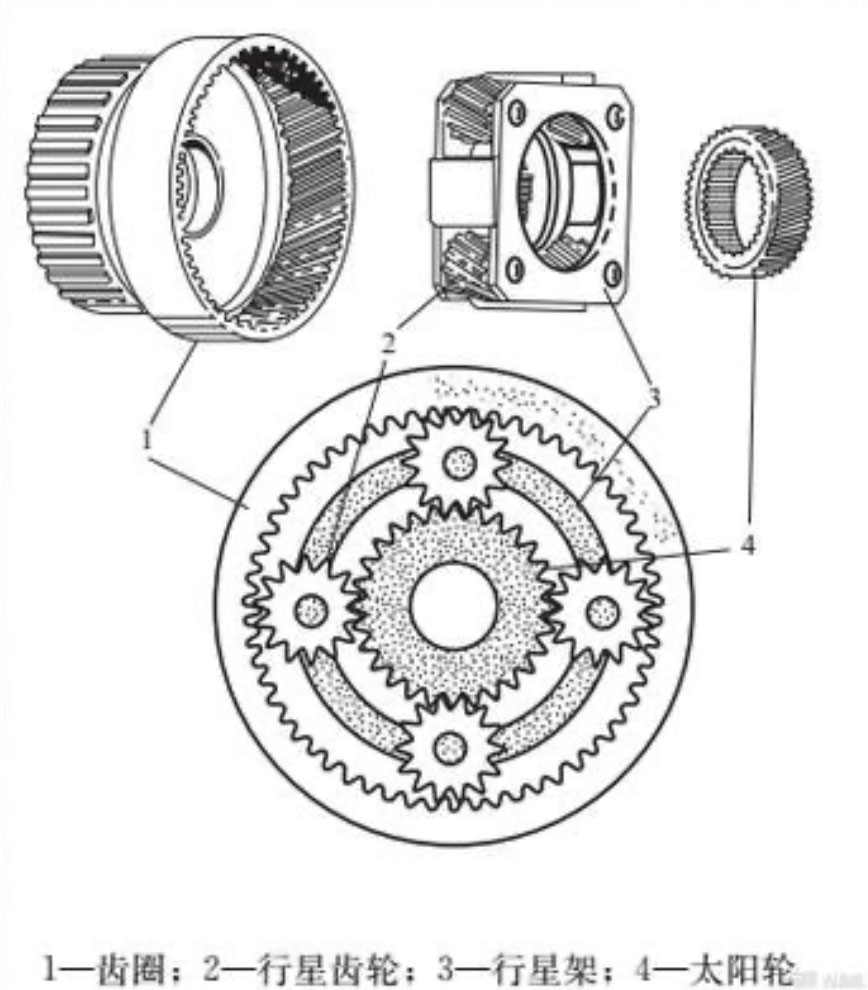
图1 行星齿轮减速机结构
一、行星齿轮的减速比推导
图2是一个行星减速机构的示意图。
r0为太阳轮半径,r1为行星轮半径,r2为内齿圈半径。
Zs为太阳轮齿数,Zr为齿圈齿数。
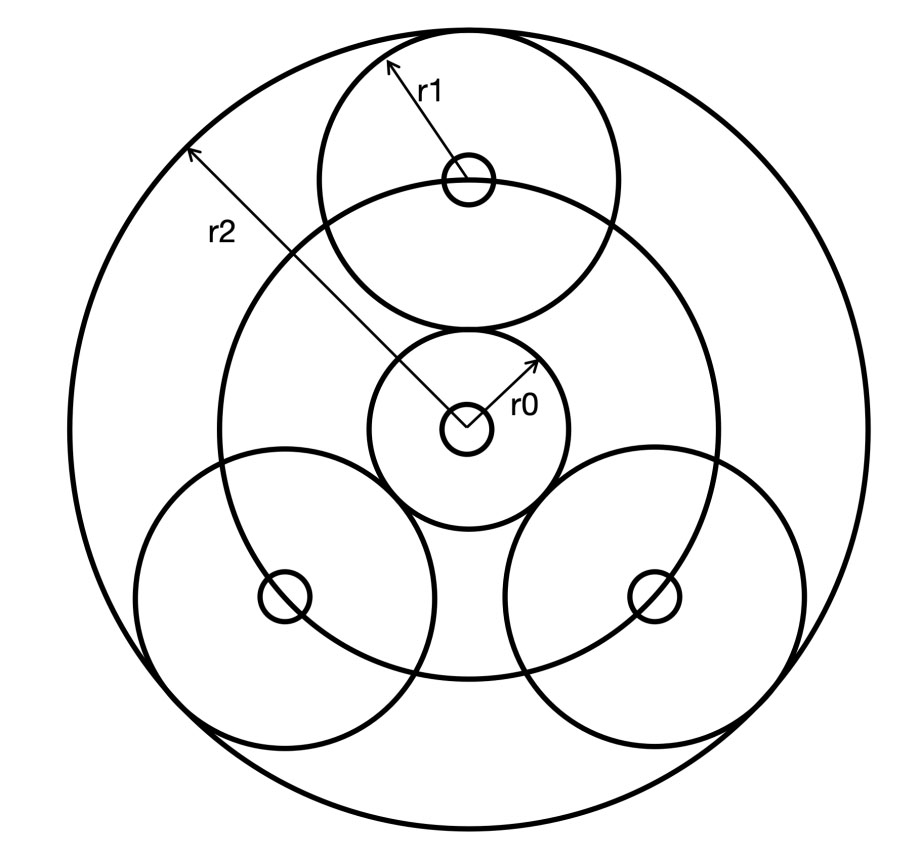
图2 行星减速机示意图
以下从两个角度来推导减速比。
(1)从齿轮啮合的行程来推导。
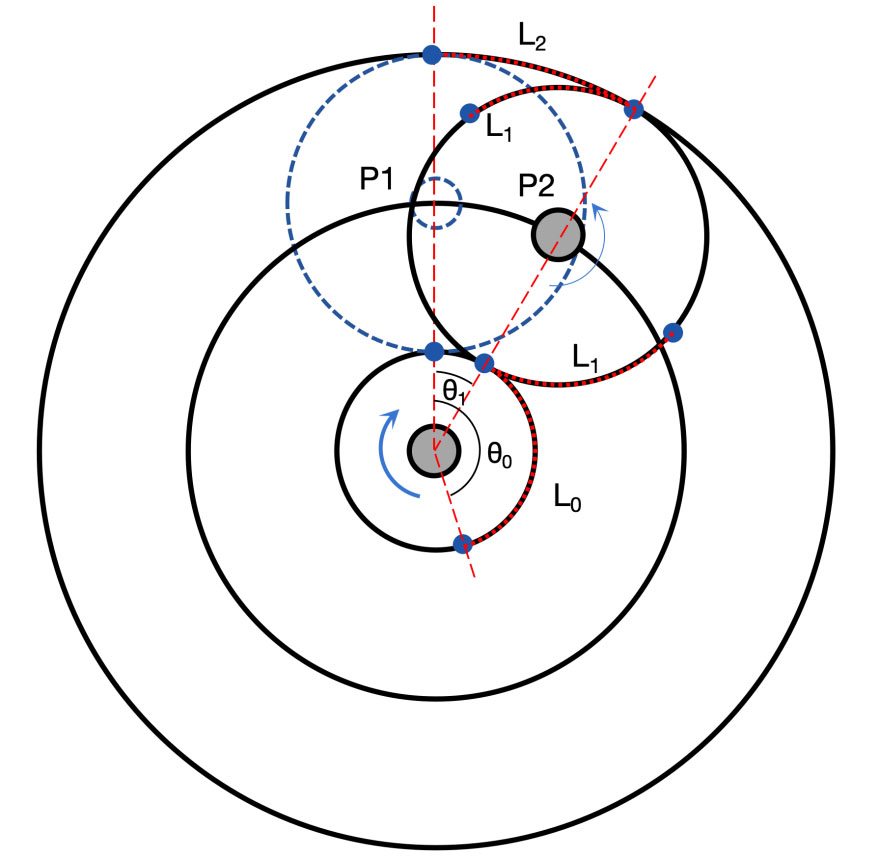
图3 行星减速机示意图
图3展示了太阳轮旋转θ0角度时,带动行星轮从P1位置移动到P2位置,行星架转动了θ1角度,其中,太阳轮和行星架顺时针旋转,行星轮逆时针旋转。在图3中,用红色的虚线圆弧标注了太阳轮、行星轮、内齿圈齿轮啮合的轨迹,长度分别是L0、L1和L2,显然有:

对太阳轮有:

对内齿圈有:

因此减速比

而由于齿轮相互啮合,所以齿数比等于半径比,即:

所以:

也就是说,行星齿轮的减速比等于内齿圈和太阳轮齿数比加1。
(2)从功率角度推导。
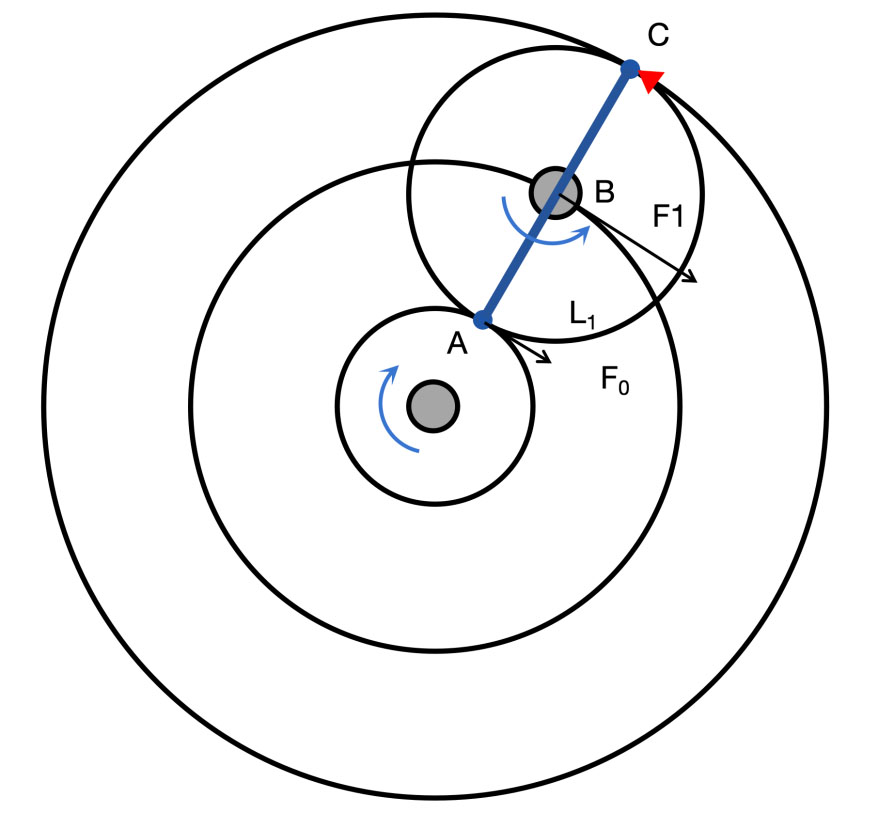
图4 行星减速机示意图
假设输入轴的功率为P0,输入转矩为T0,太阳轮转速为ω0。

那么在太阳轮和行星轮的接触点,行星轮受到的切向力为F0,n为行星轮的个数。

这时的行星轮可以看成一个杠杆ABC,支点在C点,在A点输入力F0,在B点输出力F1应为F0的两倍,那么:

行星轮对行星架施加的总力矩T1的做功功率为P1,行星架转速为ω1.那么:

当系统不存在能量损耗时:

于是:

那么减速比:

二、行星齿轮减速器的优势
(1)分散力矩,降低单个齿应力。可以看到对于平行轴减速机,输入/出齿的力矩全部施加在单个齿上,应力也集中在这个接触点上。但是对于行星减速机,同样的输入/出力矩分散在多个行星轮与太阳轮/内齿圈的接触齿上,降低了单个齿的应力。
如图5所示,两个单级减速机构的输入力矩相同,但行星减速机输入齿的局部应力是平行轴减速机的1/3倍,继续增加行星轮还能降得更低。对于输出齿也是同样的道理。
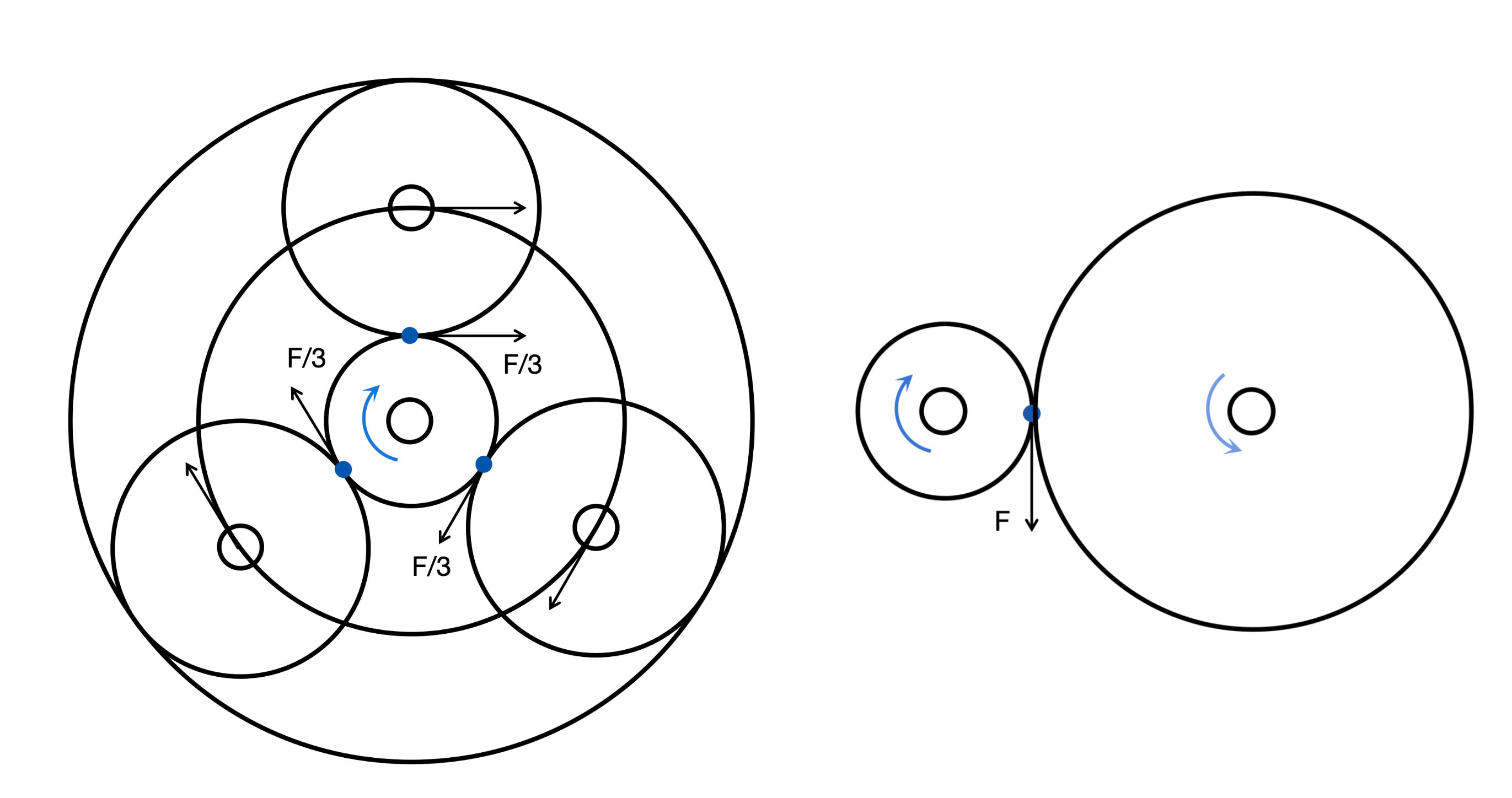
图5 行星减速机和平行轴减速机的输入/出齿受力示意图
(2)轴的径向合力为零,仅仅受到到扭矩,相同轴可以输出更大的扭矩。我们在画示意图时,两个齿轮之间的作用力都当做切向力来处理,但实际上,齿轮啮合过程中的合力并非切向,而是会在径向有个分力。如图6所示,平行轴减速机的输入齿受到一个径向的分力,这个力通过齿轮传递到轴承再传递到轴,对轴和轴承都会造成额外的负担,降低系统的寿命,所以设计时只能增加轴径进行补偿。而行星齿轮减速机的输入齿,虽然每个接触点都有径向分力,但这几个分力关于轴心对称,因而相互抵消,从而使得轴以及轴承在径向上没有受力,仅承担扭矩,因此轴和轴承都可以用更细的尺寸。对于输出轴也是一样的道理。
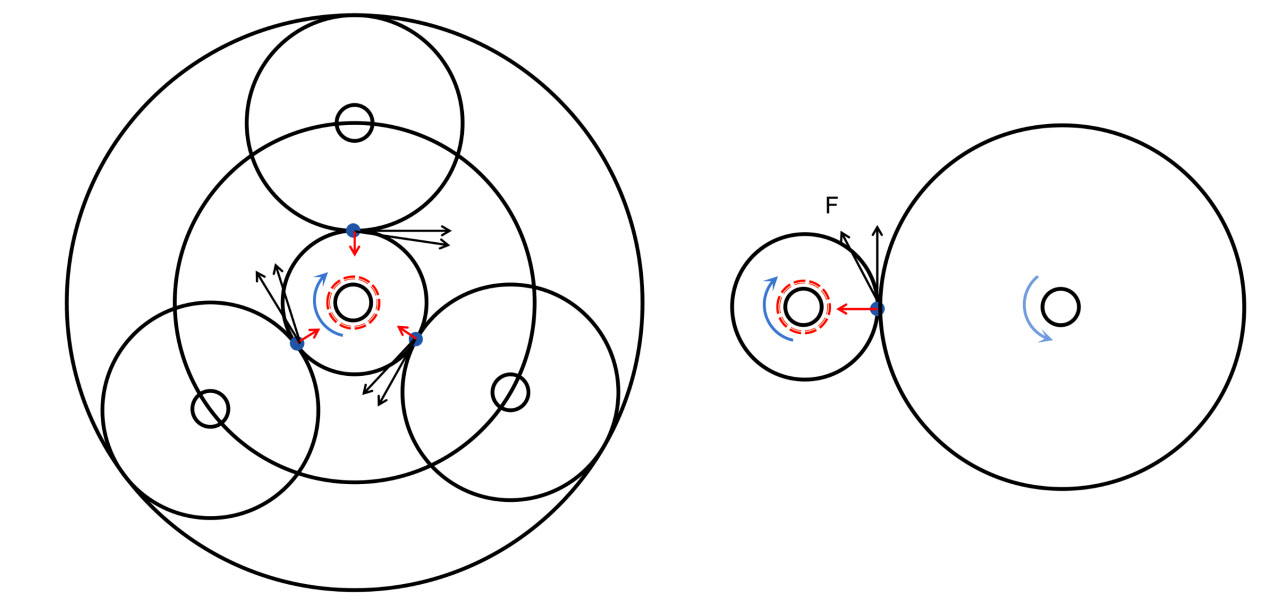
图6 行星减速机和平行轴减速机的输入齿的受力分解示意
结构紧凑,小尺寸实现大减速比。行星齿轮减速机的大齿轮和小齿轮同轴,不同级的减速机构可以叠放,因此结构非常紧凑。而对于普通平行轴减速机,齿轮轴不能和齿轮盘干涉,所以整体尺寸较大,空间利用率较低。如图7所示,对于单级减速比为i的减速机构而言,行星齿轮机构的尺寸为平行轴减速机构尺寸的(i-1)/(i+1),以i=5为例,那么前者是后者尺寸的2/3,尺寸降低33%。随着减速级数增加,尺寸减幅将进一步扩大。
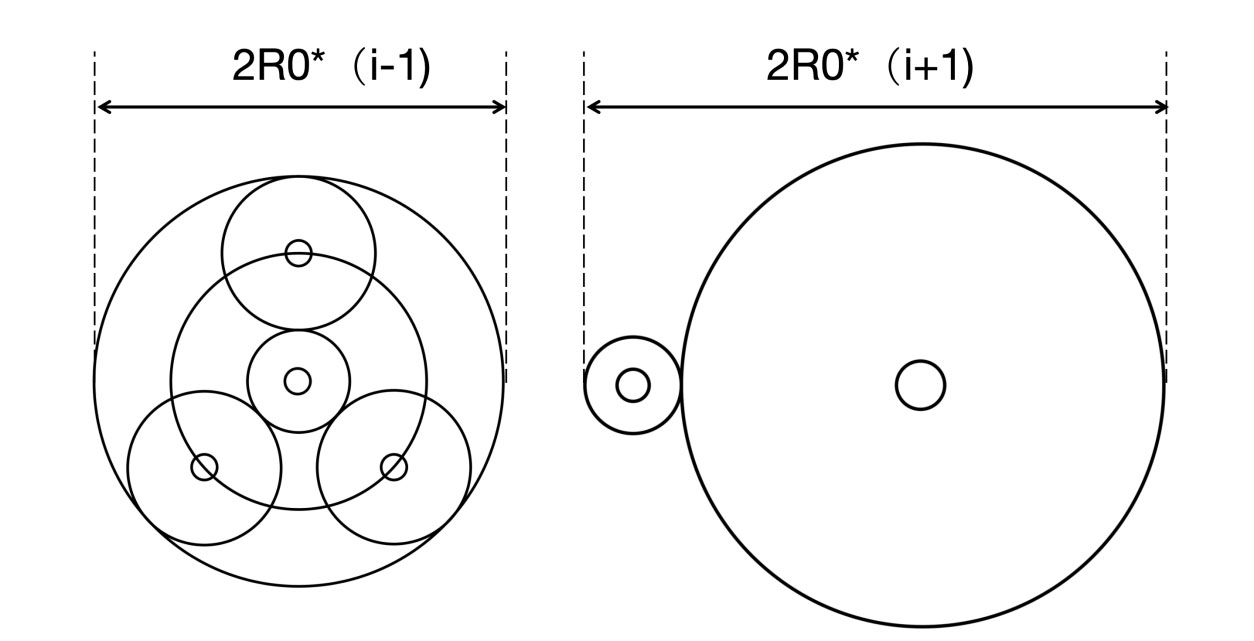
图7 相同减速比的单级行星减速机和平行轴减速机的尺寸对比