

发布时间:2025-12-30
编码器是电机控制中反馈位置/速度的传感器,是实现电机闭环控制的关键。基本原理是将位置信息转化为光、磁、电容等信号,再将这些信息号转化为电信号。编码器从信号类型可以分为:光电编码器、磁编码器、电容编码器、电感编码器等,其中光电编码器和磁编码器最为常用,下面主要介绍这两种编码器的原理。
一、光电编码器
光电编码器的原理是用明暗相间的光栅遮挡光源,在光栅另一边的光电传感器上产生高低电平,从而将位置信息转化为电信号(图1)。
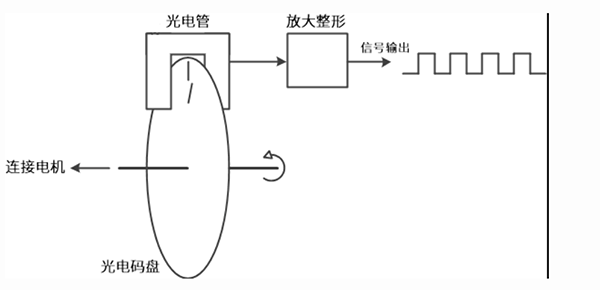
图1 光电编码器结构
1.位置/角度。光栅盘上有n条缝隙,那么圆盘每转动360°/n就会发出一个高电平信号,那么这个编码器的精度就是360°/n。通过计数信号个数就可以知道转了多少度,也就是位移信号。有了位置/位移信息,除以时间,就是速度信息。
2.方向。再加一组相位相差90°(电角度)的光栅就可以达到这个目的了(两个光栅可以集成在一个圆盘上,如图2)。不难发现,顺时针旋转时(图3),A相信号的上升沿(低电平—高电平,或者说是暗—亮 )总是对应B相的高电平状态(亮);反过来,逆时针旋转时(图4),A相信号的下降沿总是对应B相的高电平状态(亮)。这样就可以判断旋转方向了。
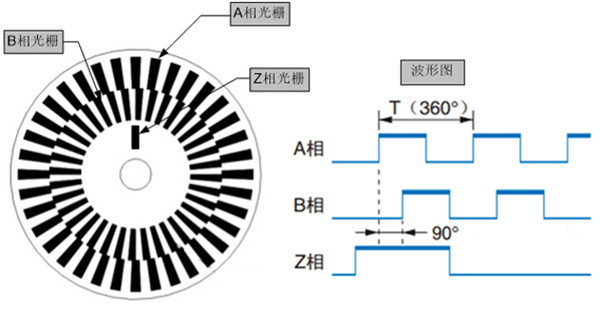
图2 增量式光电编码器码盘的光栅结构
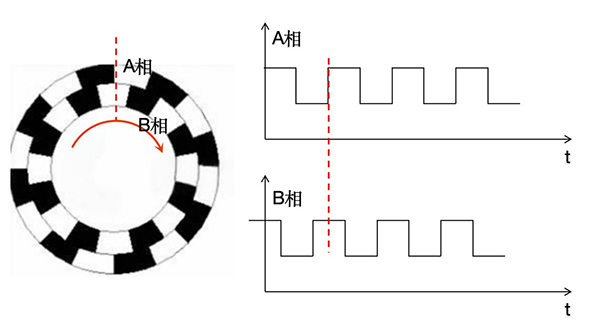
图3 顺时针旋转时,A相信号的上升沿总是对应B相高电平
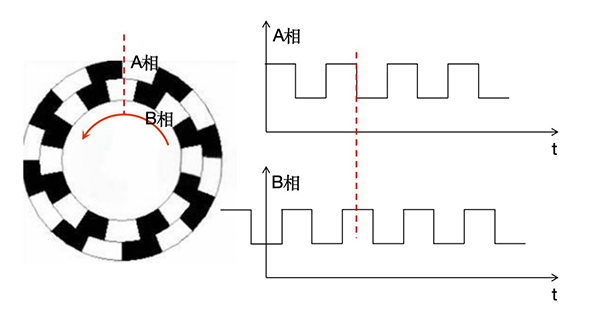
图4 逆时针旋转时,A相信号的下降沿总是对应B相高电平
基于以上原理我们就可以得到一个增量式的光电编码器,为什么说是“增量式”的,因为我们发现如图2所示的AB相光栅结构是均匀的,转到任意位置,我们只能通过输出的信号数知道它转了多少角度,但没法知道具体在哪个位置。假如这个编码器在运转过程中突然断电,恢复之后,之前跑的信号丢失了,那么位置信息就丢失了,要继续测量就必须回到“零点”重新跑。增量式编码器适合测量速度,而测量位置则需依赖零点。
如果我们想不依赖零点就能确定位置信息怎么办呢,那就需要用到绝对值式编码器。原理也很简单,假如我们让整个圆周的每个细分区间的“图形”(或者说编码)都不同就可以了。如图5所示的绝对值式码盘,可以看到码盘是同心圆结构,每个同心圆称为一个码道,然后将圆盘均分成N份,那么360°/N就是绝对值编码器的精度。
这里的N一般是2^k,而k就是码道的数量(其实就是二进制)。
例如,如图5所示,3个码道的码盘最多可以均分为8份,精度就是45°。每一个扇形区隔中的3个码道就是二进制数的3位(□□□),这个唯一的编码就对应了这个扇形区间。
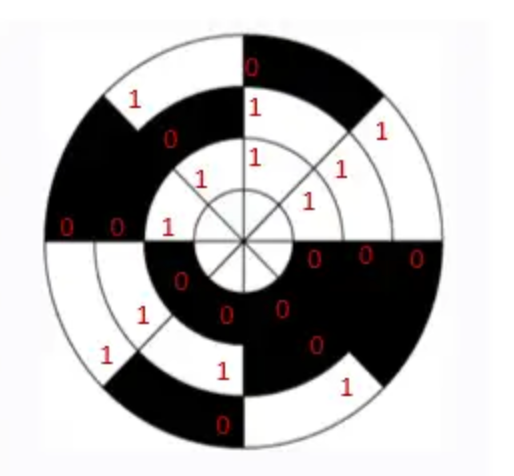
图5 绝对值式光电编码器码盘
如果要提高精度,就要增加码道的数量,精度为360°/(2k)。如果将码道增加到8个,那么精度就能达到1.4°。当然等分数不一定要等于2k,只要小于这个数,确保每个区间都有唯一的编码就行(比如,8位编码可以将圆盘200等分,精度1.8°)
二、磁编码器
磁编码器根据两种电磁效应,可以分为霍尔式和磁阻式。
霍尔式磁编码器利用的是霍尔效应,在磁场中载流导体会在磁场和电流方向的垂直方向形成电压。
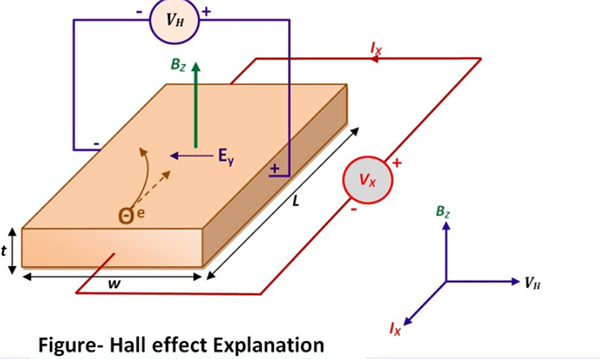
图6 霍尔效应原理(来自百度百科)
根据这个原理,只要在电机的旋转轴上贴上径向充磁的磁铁,就能产生周期变化的磁场,附近的霍尔元件就能输出变化的电压信号,从而输出位置信息。霍尔式磁编码器结构和图1所示的光电编码器很接近,只不过光栅换成了磁铁、光电传感器换成了霍尔元件。同样的,如果要测量旋转的方向,也需要在相位差90°(电角度)的位置再放一个霍尔元件,原理和图3、图4描述的相同。
磁阻式磁编码器利用的是磁阻效应,即某些材料的电阻在磁场中会产生规律性的变化(跟载流子在磁场中受到洛伦兹力影响有关)。根据这一特性也可以输出周期性的电信号,然后通过统计电信号的数量来输入位置信息,基本结构跟原理和霍尔式编码器相似。
光电编码器和磁编码器是用的最多的编码器类型,两者各有优势。光电编码器的精度和分辨率高,相应速度快,但是对环境要求较高,对灰尘、油污和震动的耐受较低,一般用在高精度的机床设备中。磁编码器能耐受脏污等比较恶劣的环境,成本也相对低,但是精度相比光电编码器低一些,而且容易受到外部磁场的影响。
原创声明:本文为金的电机原创内容,转载请注明出处,感谢!