

发布时间:2025-12-29
丝杆机构是最常用的转动变直线运动的方案,丝杆电机则直接将轴与丝杆接连(或空心螺纹轴),带动螺纹转动。对于丝杆电机我们关心的是轴向速度和电机转速关系是怎么样的,轴向的推/拉力和电机的输出转矩又有何关联,以下我们对这个问题进行分析。
一、速度传导。
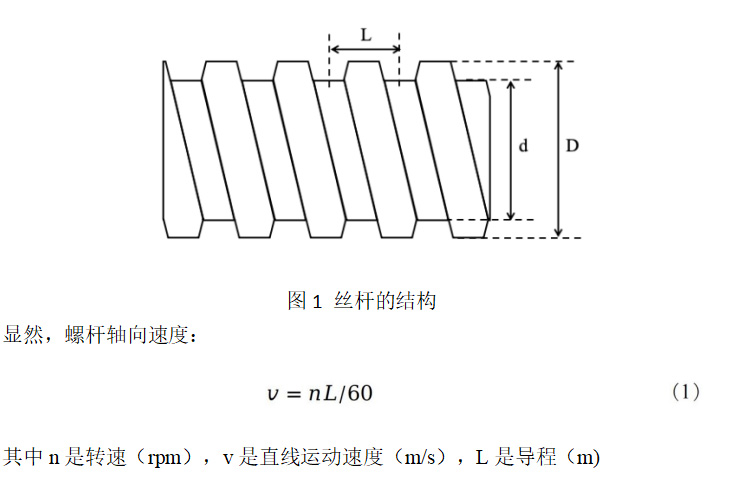
丝杆的结构如图1所示,导程L是螺杆转动一圈径向移动的距离,在单头螺纹中,导程L等于螺距。
二、力传导。
在螺杆推动螺母运动的情形中,力通过螺母和螺杆的螺纹接触面传递,为了方便计算,我们假设螺母和螺杆的螺纹接触面集中在一条线上,而这条线是在一个直径介于螺杆的内径和外径之间圆柱体上、螺距为L的螺旋线,这条螺旋线的直径我们称为螺纹中径,如图2所示。
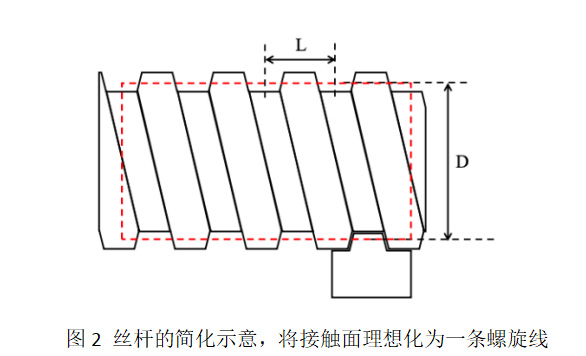
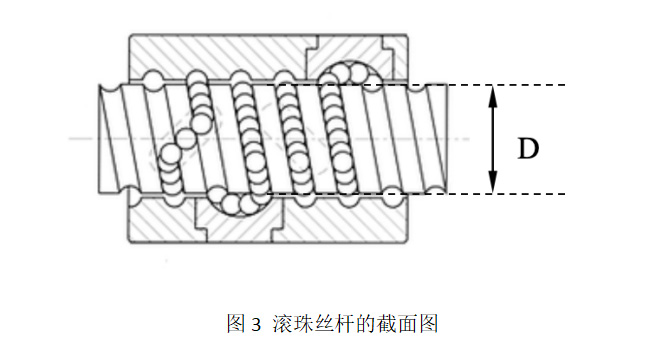
而对于滚珠丝杆而言,滚珠和槽之间就是线接触,滚珠丝杆的外径就相当于上文中T型丝杆的中径(图3)。
可以看出,当螺杆外侧螺纹向下运动时,螺母(绿色三角块)受到相右的推力(如图4上所示)。
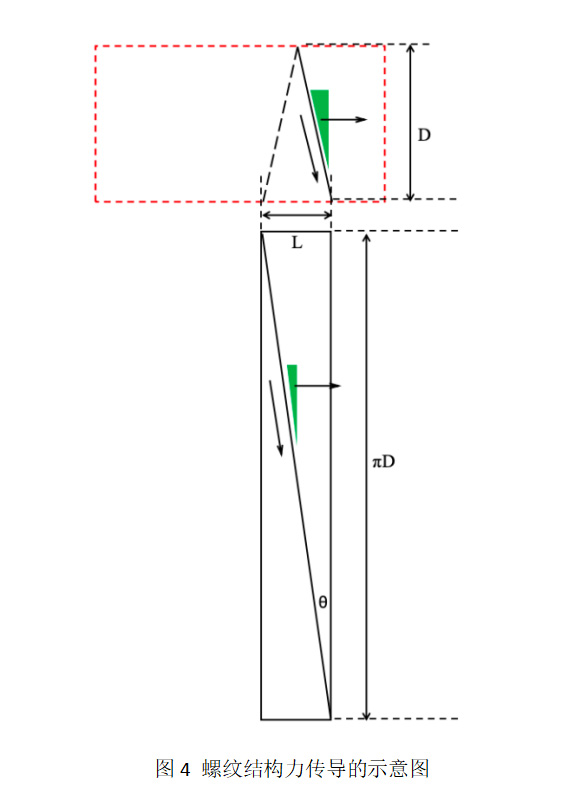
首先将螺纹所在圆柱体展开(图4),那么螺纹就变成了一段斜面,与螺纹径向平面的夹角为θ,这个角我们称为螺旋升角。
显然

进一步将图4的模型顺时针旋转90°,可以得到图5的模型,当螺杆转动时,就可以看成是这段长斜面A对斜面上一个物体B进行推动,而物体B被限制在竖直方向运动(对应现实中,螺母被限制无法旋转)
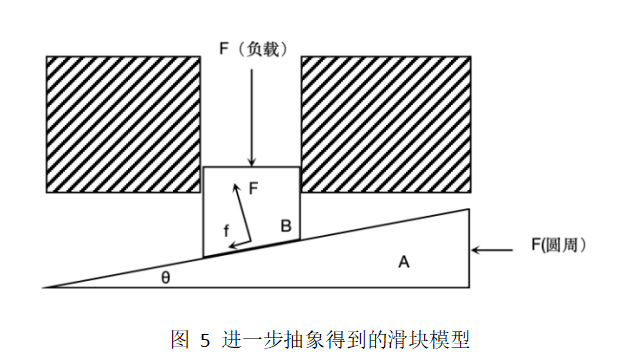
在这个模型里,A受到一个向左的水平力,这个力就是螺杆外侧的驱动力,或者说是圆周力F(圆周),在实际场景中力的方向是该点的切线方向。
B(即螺母)受到3个力的作用,分别是:
(1)负载的反向推力F,方向与运动方向相反(在图中向下);
(2)与物体A接触截面的弹力F(弹),方向垂直接触面向上;
物体A施加的摩擦力f,方向与运动方向相反(在图中相右下),大小与弹力F成正比:

μ是两个截面的动摩擦系数。
摩擦力f和弹力F(弹)也作用在A物体上,方向相反。
那么对于平衡状态的体系,针对B做受力分析,在竖直方向上:

针对A做受力分析,水平方向:

而螺杆的扭矩:

结合公式2-5,消去F(弹)、F(圆周)、f得到:

丝杆传动的效率η=输出功/输入功,即:

那么对于T型丝杆,螺纹之间是滑动摩擦,一般摩擦系数在0.1~0.5(参考表1),而T型丝杆的θ一般在5°-10°,那么这样算下来,T型丝杆的效率在20~30%。
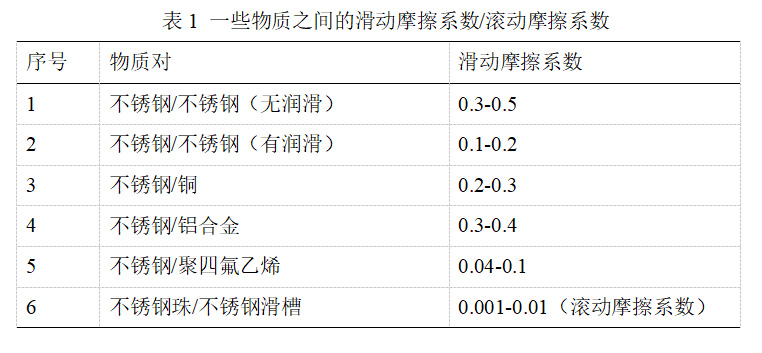
对于滚珠丝杠,由于滚动摩擦系数非常低,一般在0.001-0.01,滚珠丝杠的θ一般在10°-20°,由于μ和tanθ都是较小的数值,效率公式中的μtanθ接近0,那么效率可以近似简化为:

那么计算可得,滚珠丝杆的效率很轻松可以达到90%以上。
反过来,当我们知道丝杆的传动效率η,那么丝杆推力:

例如,当我们知道某T型丝杆传动效率是30%,导程10mm,电机输入转矩是1Nm,那么就可以算出丝杆推力为188N;相同情况下导程10mm的滚珠丝杆的推力则可以达到565N。
关于摩擦角λ。
在以上的推导的模型中,我们假设突然丝杆的驱动力消失(即A受到向左的力F(圆周)消失),那么这时A在水平方向上受到的合力为(规定向左为正):

当θ在某个合适的位置时,正好使得丝杆被负载力推动反方向匀速转动,我们称此时的θ角为摩擦角λ,此时摩擦力:

而F(A)=0,所以有:

即:

或者:

显然当摩擦角λ等于螺旋升角θ时,螺杆恰好可以被负载推动反方向匀速转动。
而当摩擦角λ小于螺旋升角θ时,A在水平方向受到的合力:

这个力小于0,那么合力方向往右,从而导致螺杆反方向运动。
当而当摩擦角λ大于螺旋升角θ时,A将处于静止状态,其受到的静摩擦力和弹力在水平方向上相互抵消,这种状态我们称之为“自锁”。所以螺杆机构自锁的条件为:λ>θ。由表1可知滚珠丝杆的摩擦系数小于0.01,对应摩擦角将比1°还要小,也就必然小于θ,显然滚珠丝杆是不能自锁的。而对于一般的T型丝杆,摩擦系数按0.2计算,那么对应的摩擦角约为11°,如果需要自锁,那么θ便要小于11°。
反过来,我们将λ代入螺杆的推力公式(7)可以得出:

代入效率公式可以得出:

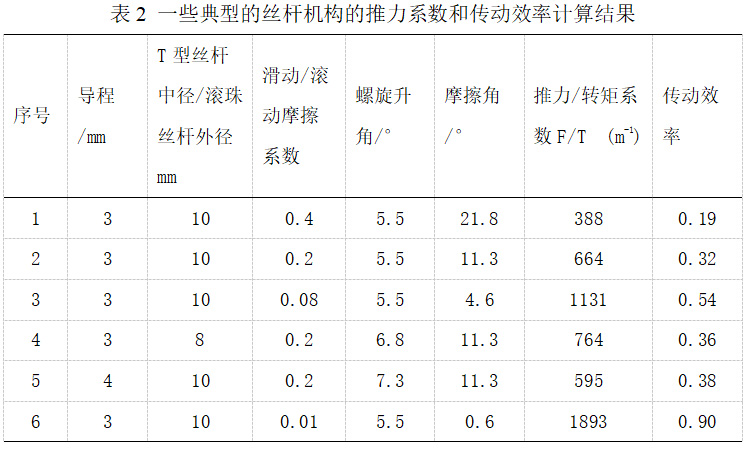
将一些典型的参数代入公式后可以计算出典型丝杆机构的推力系数和传动效率,如表2所示。
掌握以上丝杆传动原理之后,对于丝杠传动机构的电机选型就再也难不住你啦!