

发布时间:2025-12-19
百度百科对步距角的定义是:步进电动机每接收一个电脉冲信号时转子转动的机械角度。如果考虑到半步以及细分,那么这个描述可能还不太准确。书上对步进电机步距角的定义是:当步进电机切换一次定子绕组的激磁电流时,转子就旋转一个固定的角度即步距角。这个描述要更加准确一点,在这里切换一次定子绕组,应当指的是从某一相通电“切换”成另一相通电。
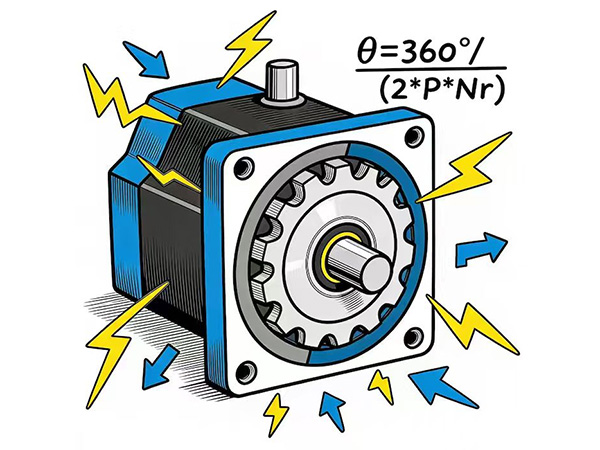
步距角它是由电机的物理结构决定的,主要取决于定子绕组相数P和转子极对数(对于VR步进电机是齿数)Nr。计算公式是:
步距角θ=360°/(2*P*Nr)
这时有朋友就要问了:步进电机的不是用驱动就可以细分吗?多细分几次精度或者说分辨率不就高了吗?
如果这么想,好像也不用费心用50齿转子做1.8°步距角,做个30°步距角去细分不就行了。实际上啊,这个步距角可以看做是步进电机的出厂分辨率,而细分呢,就是所谓的“抗锯齿技术”(玩游戏的朋友应该都知道哈)。步距角是电机本身的物理特性,是步进电机分辨率的“底层逻辑”。细分是通过控制电信号的强弱来实现的,从精度上看是无法得到保障的。从信号的角度讲,步距角是通过电流的“通/断”,即0/1,来实现的,属于数字信号式的执行;细分是通过电流的强弱变化来控制,属于模拟信号式的执行。
那么步距角为什么取决于定子绕组相数和定子极对数,为什么是θ=360°/(2*P*Nr)呢,我们是这么理解的:
首先说定子相数P。定子有P个相,每个相有2个通电方向,因此定子基本磁场状态的数量就是2P。例如:
单相定子,无论是2个绕组也好,4个绕组也好,2N个绕组也好,因为只有一根导线,所以只有A和A-两个状态。
两相定子,不论是4个绕组、8个绕组、4N个绕组,因为只有两根导线,所以有A/A-/B/B-四种磁场状态。
为什么强调说是基本磁场状态(只有单相励磁时的磁场状态)呢,因为单相励磁时转子的位置才是步进电机的基本位置,而步距角是指两个相邻基本位置(切换一次定子绕组)的夹角。各相磁场叠加,可以通过调节电流制造出无数个叠加磁场状态,这是步进电机细分的基础。利用细分原理可以将步长大幅缩小,但正如上文所解释的,细分的步长并不是步距角。
当我们改变各相电流通断和方向时,实际上是让定子磁场的所有状态依次进行变化。
例如:
单相:A>A->A;
双相:A>B>A->B->A;
三相:A>B>C>A->B->C->A
对于永磁式和混合式步进电机,转子上的NS极是交替分布的(N-S-N-S-N)。转子在转动过程中,经历一个NS极对的旋转角度后又回归了初始状态,因此在1个N-S-N(一个极对数)的转动过程中势必会跟所有定子磁场状态(2P个)依次达到平衡位置。
当步进电机转子完成一个完整360°机械角的旋转时,经历了2P*Nr个平衡位置,而相邻平衡位置的夹角就是步进角。因此对于永磁式和混合式步进电机,步距角θ=360°/(2*P*Nr)就是这么来的。
那么对于VR型步进电机(可变磁阻型步进电机),转子并非永磁体,而是带齿的铁磁体,利用磁阻最小原理来驱动。这种情况原理其实一样,在经历一个齿槽结构的旋转之后,转子其实相当于又回到初始位置,在这个过程中转子势必也经历了所有定子磁场状态(2P个)对应的平衡位置。因此当步进电机转子完成一个完整360°机械角的旋转时,经历了2P*Nr个平衡位置(Nr在这里是转子齿数)。所以对于VR型步进电机,步距角也是θ=360°/(2*P*Nr)。