

发布时间:2025-12-16
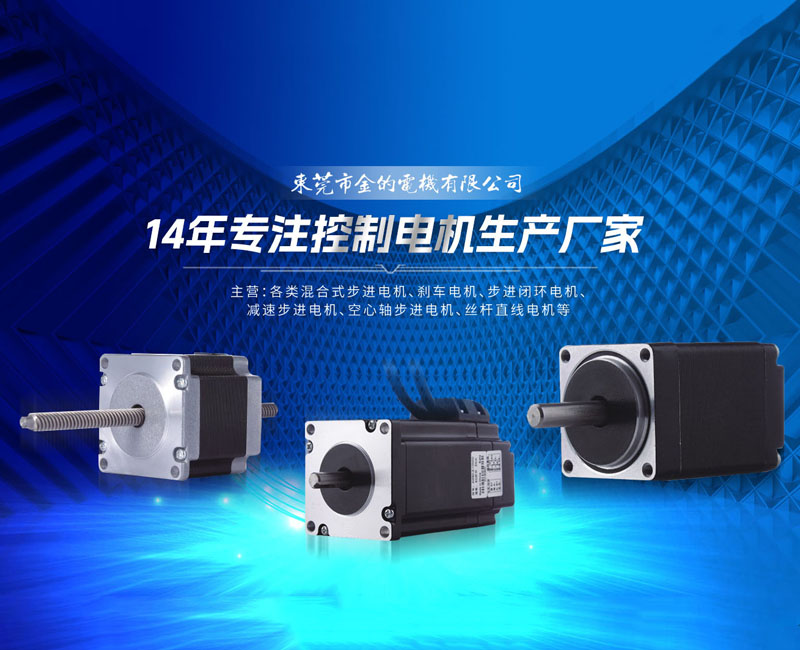
这台看起来平平无奇,跟小时候玩的盗版奥迪双钻四驱车里的直流小马达样子差不太多的小电机,其实是一台PM步进电机。小小身躯装着简单但构思精巧的结构,这篇文章带你看懂PM步进电机!
图1 一台典型的PM步进电机
PM步进电机的基本原理与混合式步进电机是完全一样的,区别就是在于它的转子是永磁体构成的,PM就是permanent magnetic的缩写,意思就是永磁的。
PM步进电机的转子就是在转子外沿轮流分布永磁铁,NS极相互交错,表面均匀无齿(图2所示)。这与混合式步进电机的转子结构是完全不一样的设计。显然这种设计无法让转子极对数达到很大的数量,一般就是5-12对,而混合式步进电机转子的轴向永磁体磁场和交错齿结构,让其转子的极对数达到了50(甚至100)。
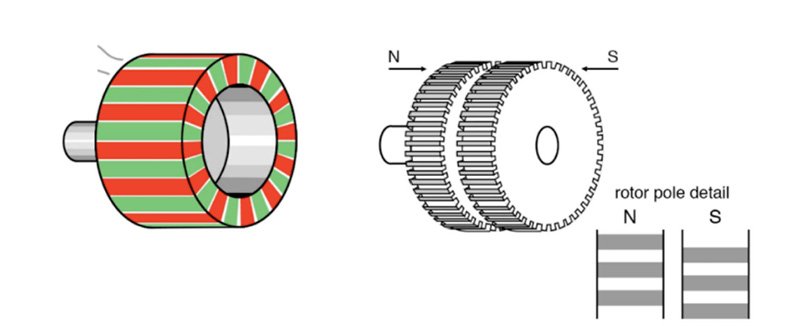
图2 PM步进电机(左)和混合式步进电机(右)转子结构示意图。
说完了转子结构,接下来说PM步进电机巧妙的定子结构,如图3所示。可以看到一相只有一个绕组,绕组的两极方向各有一个带爪的极板,N、S极的极爪相互交错分布在绕组内侧。磁力线通过极板的引导,在绕组内侧形成了NS极交错的磁场分布。
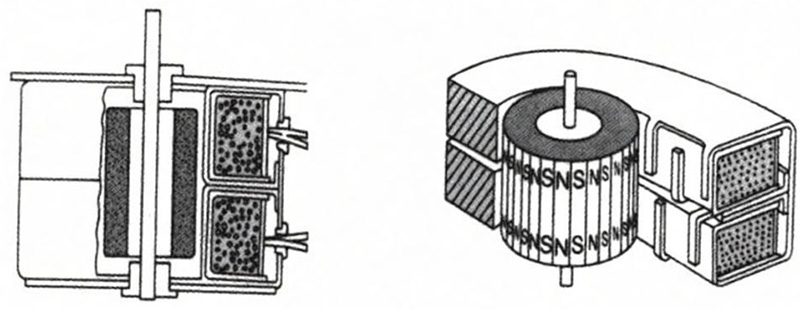
图3 2相PM步进电机的剖面图(左)和剖面立体图(右)
其他相的绕组则与第一相绕组同轴放置,磁场相互交错一定的角度。交错的角度(电角度)可以记为:
θ=180°/P
P是电机的相数,最终这个交错的角度θ转换成机械角度便是PM步进电机的步距角。
PM步进电机的结构可以用图4所示的示意图来表示。外面两圈分别是定子的两相(为了方便,将平行放置的大小相同的定子线圈画成了同心圆环,其实不同相定子是同轴放置的大小相同的线圈结构),蓝白相间的格子代表的就是间隔分布的极爪,最里面的环形代表转子上的永磁体磁极。转子极对数和定子极对数是相等的。
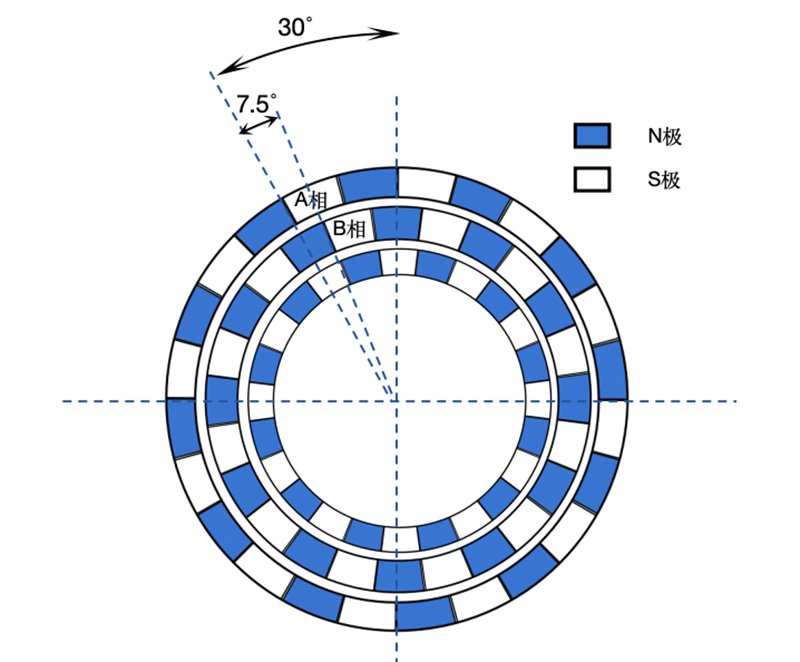
图4 2相PM步进电机转子定子磁极示意图
接下来我们以2相PM步进电机为例,假设定子、转子极对数都是12。
那么根据上文的讨论,A、B两相的极爪放置角度(磁场角度)应当交错180°/2=90°(电角度),由于转子极对数是12,那么转换成机械角度就是90°/12=7.5°。由于极对数是12,一个N极或S极占据的角度即为15°,所以两相位置偏移正好是半个极爪的位置(如图4所示)。
那么PM步进电机又是如何转起来的呢?
我们将两相按照这样的顺序通电:A>B>A->B->A。A代表A相正向通电,A-代表A相反向通电。
那么假如初始时,A相通电,那么平衡时,转子和定子的位置应当如图5所示
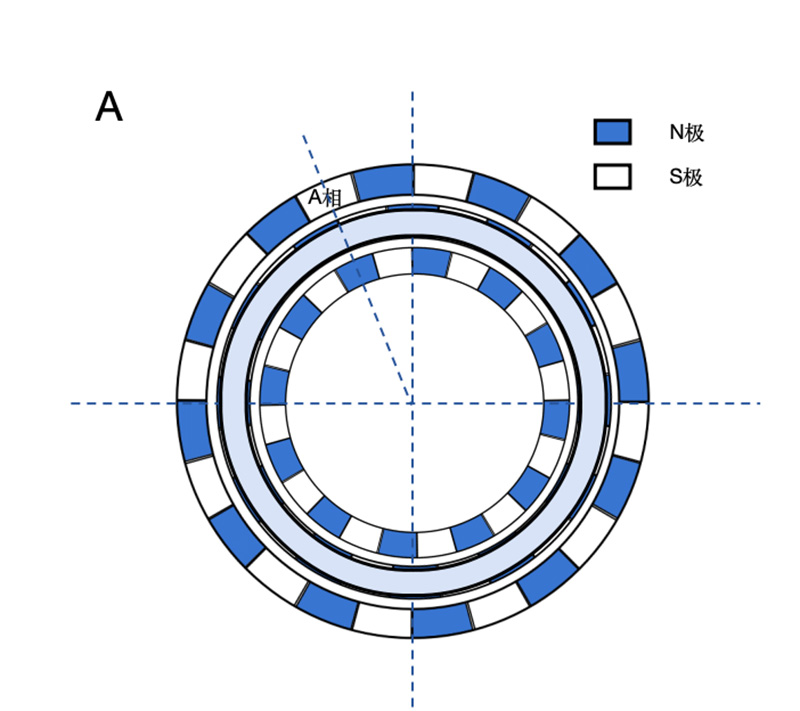
图5 A相通电时,转子N极与A相定子S极爪对齐
这时,切换成B相通电,那么磁场情况变成图 (左)所示状态,那么转子受到定子磁场顺时针的力矩,从而顺时针方向转动一个步距角,显然这个角度就是7.5°,转动之后的平衡位置如图6(右)所示。
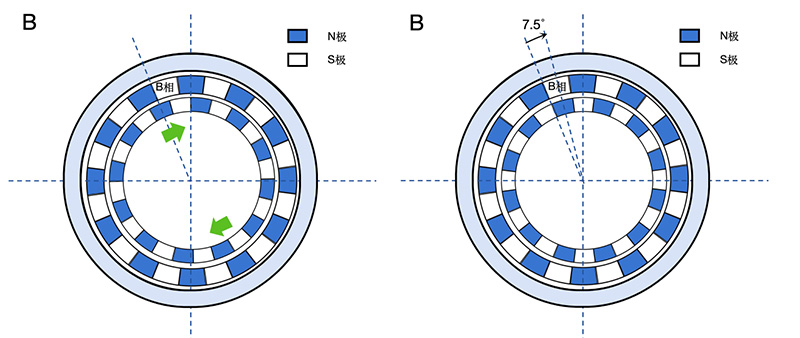
图6 A切换到B后磁场变化以及转子受力情况(左),切换到B相后平衡状态(右)
接下来切换成A相反向通电,那么磁场情况如图7(左)所示,显然,转子继续受到顺时针方向力矩,继续转动下一个7.5°到平衡位置(图7(右))。
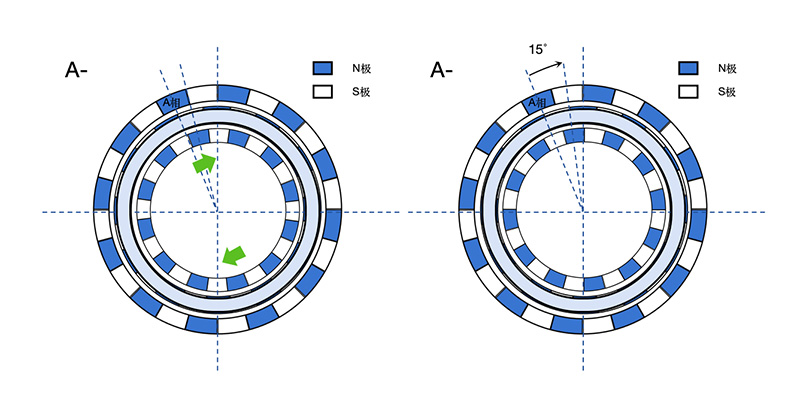
图7 A相通反向电流时,定子、转子磁场情况以及转子受力示意(左)以及平衡位置(右)
就这样随着两相电流的切换,转子便持续转动了起来。
至于两相励磁、半步驱动以及细分驱动的原理就和混合式步进电机一模一样啦,感兴趣可以参考前面的文章步进电机的驱动模式及其原理。
以上是两相PM步进电机的结构与运行原理,那么更多相数呢,其实本质还是一样的,下面以三相PM电机的结构举例。
结构上,三相PM步进电机就是在两相电机基础上再多叠一个线圈(图8)。三个线圈极爪的交错的电角度为180°/3=60°,在极对数为12的情况下,转换成机械角度也就是5°。因此三相PM步进电机(极对数12)的步距角就是5°。
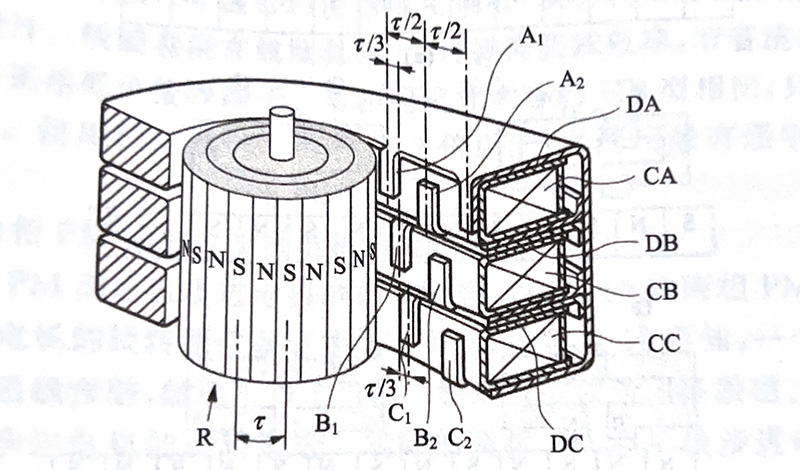
图8 三相PM步进电机的剖面立体图
三相PM步进电机的定子和转子磁极位置关系可以用以下示意图来描述。可以看到转子S极依次与A、B、C相N极对齐,然后再与A-相N极(A相S极)对齐,转子每次转动的角度为5°,即步距角。
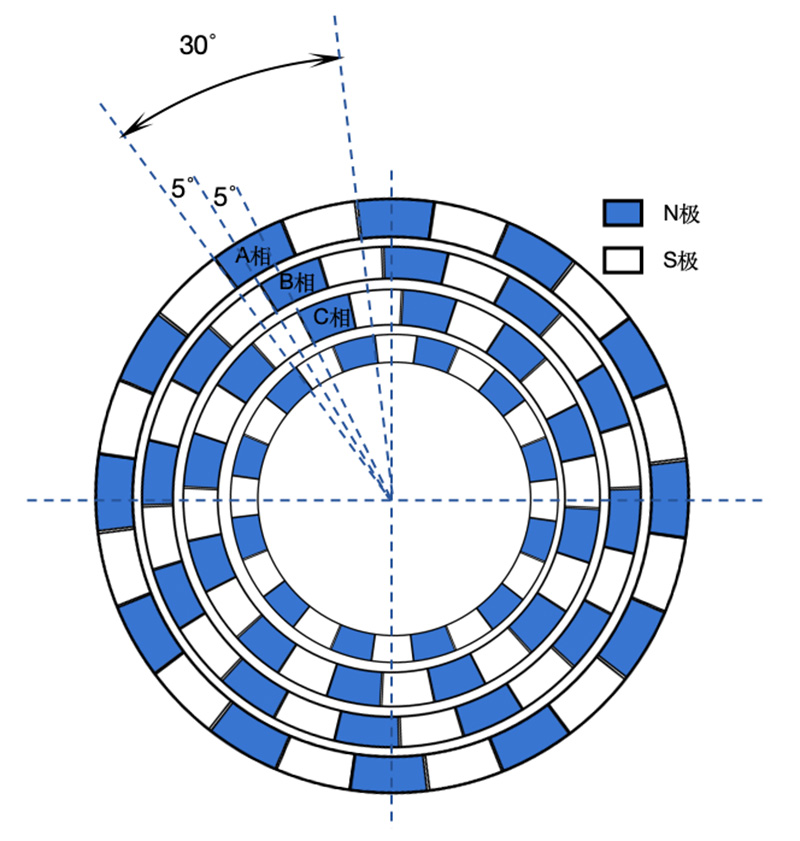
图9 3相PM步进电机的磁极分布示意图。
综上,可以看到,对比混合式步进电机而言,一方面,PM步进电机没有精细的齿槽结构,因此材料的加工难度降低很多;另一方面,PM电机每一个相都只有一个线圈,绕线复杂程度大幅下降(对于混合式步进电机,每一相都有2-4个绕组)。因此PM步进电机的生产成本低很多。但是由于转子的永磁体磁极很难再做得更多,因此PM步进电机的精度相对来说会更低一些。
以上就是PM步进电机的结构和驱动原理啦,利用简单的结构便实现了步进电机的功能,实在是巧妙!