

发布时间:2025-11-29
以步进步距角为1.8°的混合式步进电机为例。转子50齿;定子8极,每极6齿,一共48齿。
首先我们看静态下,定子和转子的结构。转子是50个齿均匀排布。定子48齿分为8极,每极6齿,各极上的齿距和转子是一致的,可以一一对应。定子齿的排布可以这样理解:将原本与转子一一对应的50个齿截去2个完整的齿(即2个齿顶和2个齿槽),再均分为8个极,依次均匀排布在圆周上。
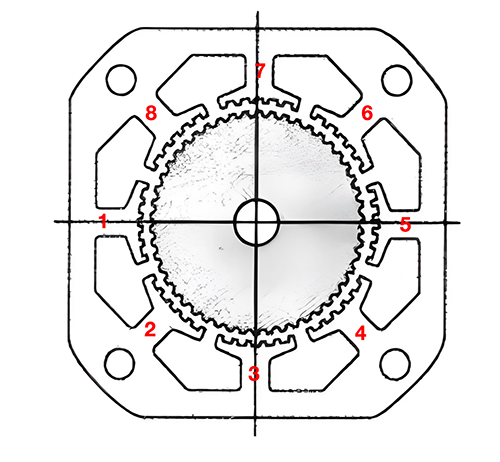
图1 步进电机定子结构示意图
将定子8个极逆时针依次标记为1-8#。将第1极的第一个齿记为1号定子齿,逆时针依次标记。与1号定子齿对应的转子齿记为1号转子齿,逆时针依次标记。让第1极与转子齿恰好对齐,如图2所示。
第1极定子和转子一一对齐。
由于极间隙的存在,第2极定子齿“超前”转子齿1/4个齿,称为“半对齐”。(参考定子/转子第7齿的位置关系) 同样的第3极“领先”转子又多了1/4齿,也就是1/2个齿,也就是完全错开了,可以参考第13个定/转子齿的位置关系。第4极的齿“领先”转子3/4齿,半对齐;第5极“领先”了完整的一个齿,因此定子和转子齿又完全对齐了。
接下来的第6、7、8又重复以上过程,最后回到第1极,整个过程中定子和转子差了2个齿位。
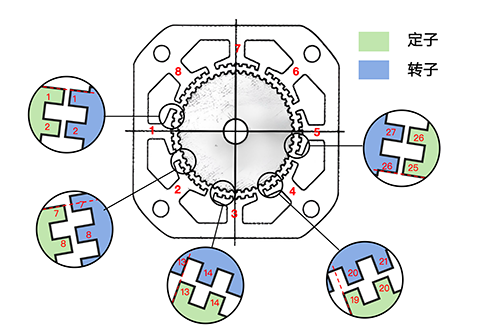
图2 静态下步进电机转子和定子齿的结构对应关系
接下来我们看步进电机是如何转动起来的。
8个极爪上会绕上两组线圈,分别称为A相和B相。绕线的方式参考图2。其中1、3、5、7极是一相(A相),对应一条线,2、4、6、8是另一相(B相),对应另一条线,一共引出四个线头。图3显示了各绕组的绕线方向,箭头代表纸平面靠外的线束的绕线方向。
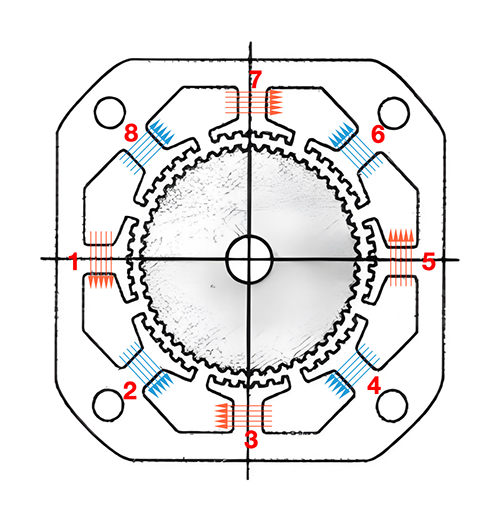
图3 绕组的绕线方向
若按照AB两相轮流通电产生的磁极方向如图4所示。
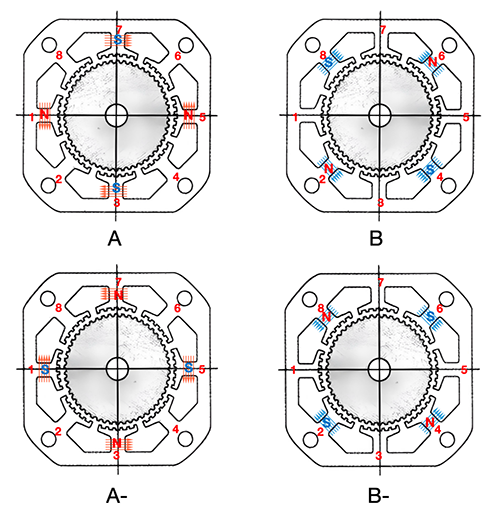
图4 不同相电流方向以及磁极方向
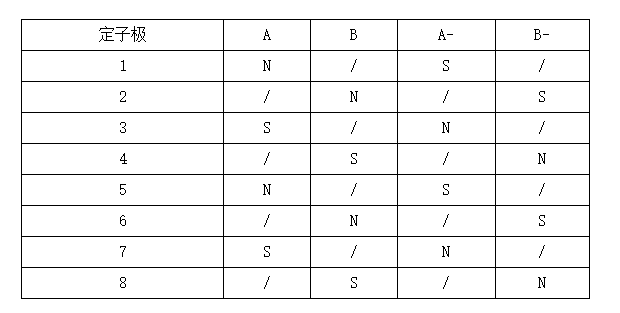
用表格标识为为:
接下来我们分析转子如何转动。
假设初始时定转子在图1展示的位置,按照A>B>A->B->A顺序通电。
那么第一步,A相通电时,1、5定子N极齿与转子S极齿对齐,3、7定子S极齿与转子槽(也就是纸面内部转子的N极齿对齐),恰好处于平衡位置。参考图5。
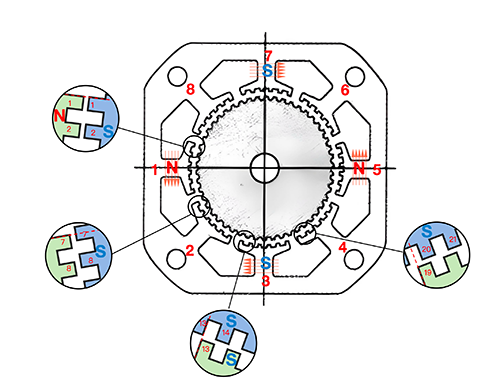
图5 初始时A相通正向电流(A)时转子处于平衡状态
第二步B相通电,如图6所示,第2、6定子极对转子(纸面外侧)产生逆时针方向的吸引力,第4、8定子极对转子(纸面外侧)产生逆时针方向的排斥力,从而让转子开始逆时针转动。以上针对纸面外侧转子的受力分析,其实对纸面内测的转子受力分析的结果是一样的,由于内外侧转子的齿完全错开,磁极相反,外侧齿槽的位置就是内侧齿顶位置,这时,第2、6定子极对纸面内侧转子产生的是逆时针方向的排斥力,而第4、8定子极对内侧转子产生的是逆时针方向的吸引力。总的来说在这个步骤中,四个定子极对内外侧的转子产生的力矩方向都是逆时针的。
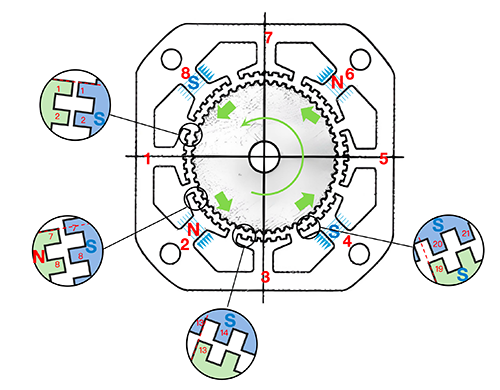
图6 B相正向通电后转子的受力分析
显然旋转一步的步长是1/4个齿,一个圆周360°分为50个齿,1/4齿每个步长意味着旋转一圈总共需要200步,每步1.8°。这就是为什么8极两相50齿步进电机的整步步长为1.8°。经过第二步的转动,转子将转动到如图7所示的新的平衡位置。
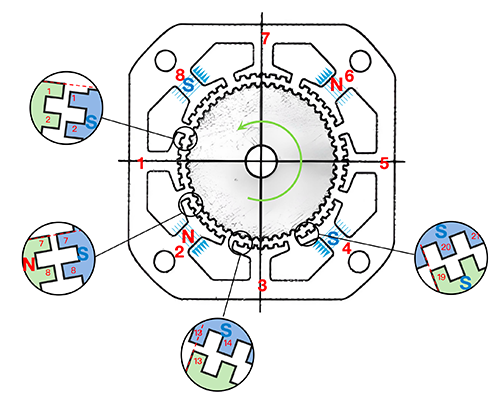
图7 B相正向通电后的平衡位置
第三步,A相通反向电流(A-),此时转子受力情况如图8所示。第1、5定子极对转子产生逆时针方向排斥力(外)和吸引力(内),第3、7定子极对转子产生逆时针方向的吸引力(外)和排斥力(内),总之转子受到的力矩方向仍然是逆时针方向,这让转子继续旋转1.8°到下一个位置(图9 )
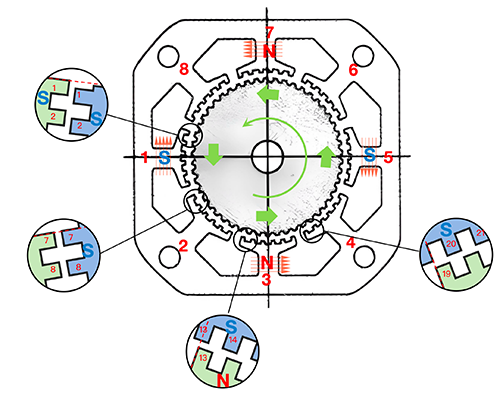
图8 A相反向通电后转子的受力情况
图9 B相反向通电的平衡位置
第四步B相通反向电流(B-),仍然对转子产生逆时针方向的力矩,这样一直持续下去,转子就一步步转动起来了。
在第一步不变的情况下,第二步B相应如果通相反的电流(B-),那么转子受到的初始力矩就变成了顺时针方向,在按照A>B->A->B>A的顺序通电,那么转子就持续顺时针转动啦。
上面这种转动模式下A、B相轮流通电,这种驱动模式就是所谓的“单相励磁全步驱动”,调整通电的顺序和节奏,可以改变步长和转矩,比如“两相励磁全步驱动”、“混合励磁半步驱动”等。
以上我们将步进电机的结构和转动方式拆解的非常细,也建立了很直观的模型,后续在这个模型的基础上我们再继续解释步进电机的其他重要概念。
金的电机在步进电机领域深耕十余年,基于对步进电机的结构原理的深刻理解,金的为客户持续提供优质的服务并不断创新。接下来的系列文章里,金的将带您继续搞懂步进电机。
东莞金的电机有限公司
金的电机金的品质Golden Motor Golden Quality